在多标签定位系统中必然会出现多个标签同时与读写器
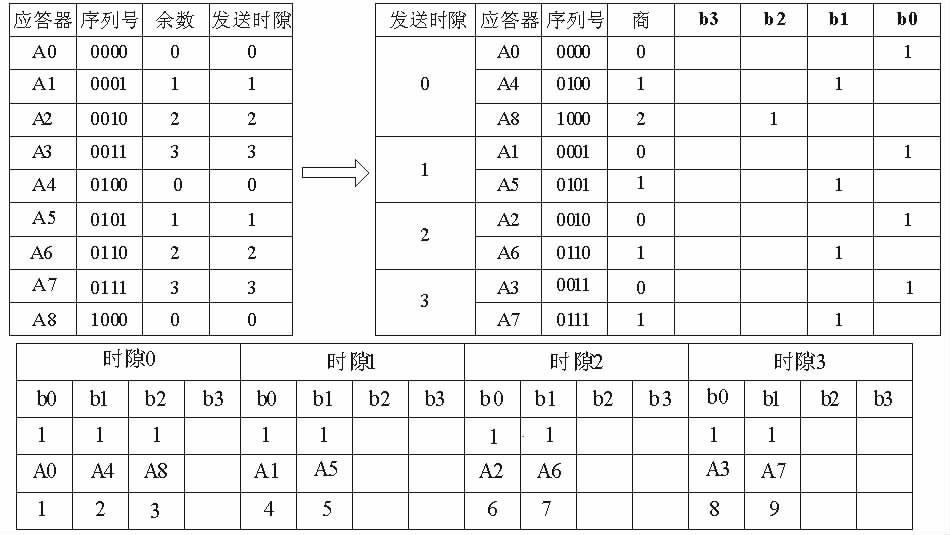
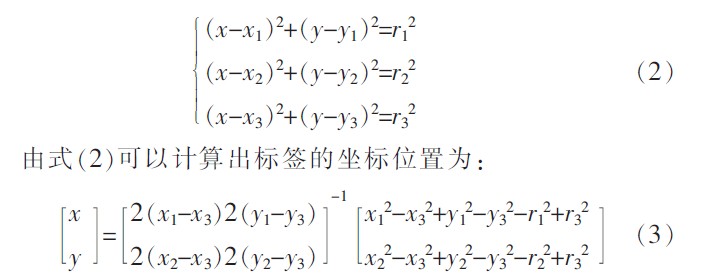
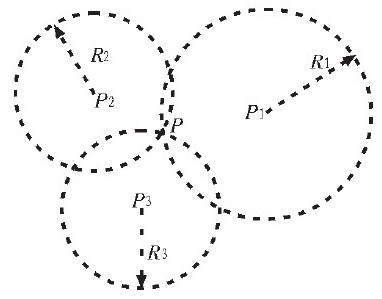
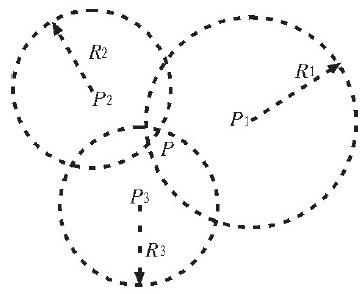
通信产生信号碰撞的情况。目前RFID多标签防碰撞算法有多种:多址技术、ALOHA防碰撞算法、二进制防碰撞算法等。多址防碰撞算法是以增加系统的复杂性和提高成本为代价,且有无法克服的缺陷;ALOHA防碰撞算法有时会导致读写器出现错误判断,对某个标签是否在读写范围内产生误判,同时还存在冲突概率较大的问题;简单的二进制防碰撞算法有时并不能够取得很好的避碰效果。文中采用基于序列号对时隙数运算的排序算法,该算法可以克服上述误判的问题,并且易于实现、效率高、软件编写简单,可以不受标签数量的限制,是一种稳定可靠、实用性强的防碰撞算法。RFID定位算法有:LANDMARC、基于信号达到角度的定位法(AOA)等,这里采用圆周定位算法,该方法简单可靠,易于在线实施,且具有一定定位精度。


 举报
举报