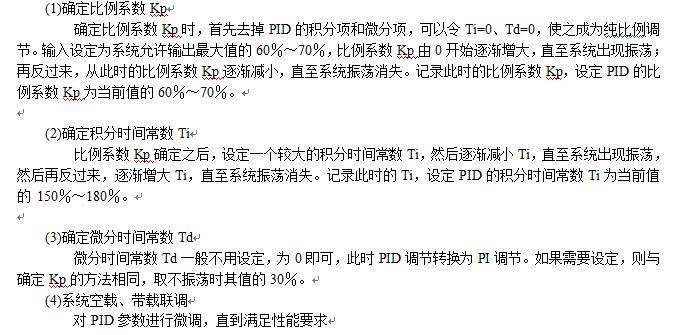
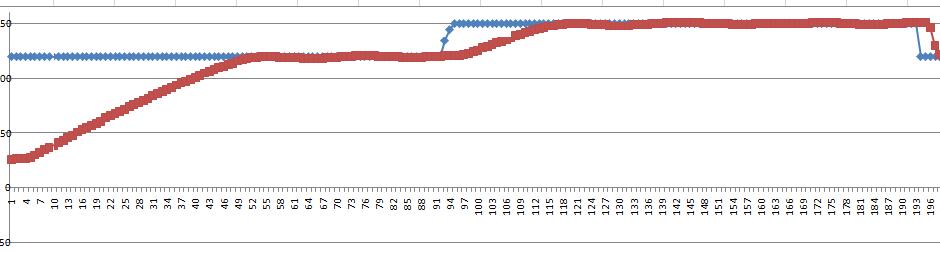
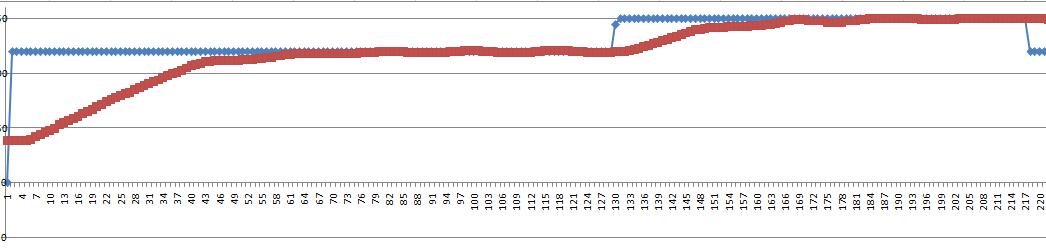
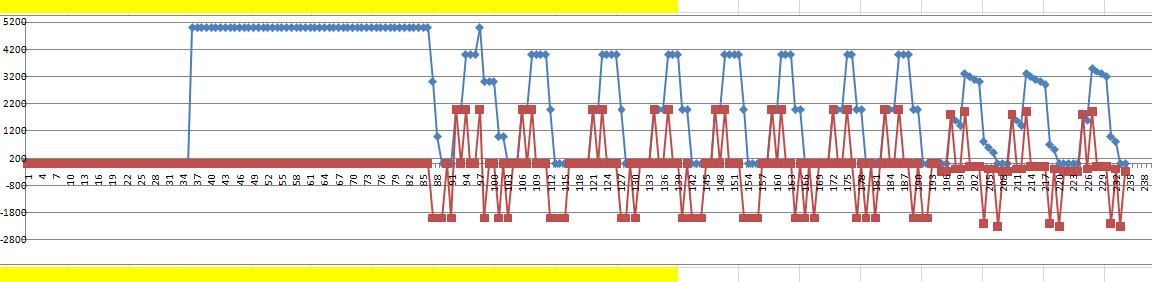
1、不是振荡。振荡的图像会比较像三角函数的图像才对。
2、KP值和输出最大值相关,但是没有严格的、或者近似的线性相关关系,因为输出最大值还要受KI KD影响。KP值过大的时候无论KI KD如何都会不可避免地发生振荡,剧烈变化很正常。
3、没明白楼主要表达什么
4、KD没有表现出明显结果,一种情况是因为PID的计算速度相对于被控对象的反应速度来讲还是太快了。
有一种可能,即使楼主的T=5s,但是,加热装置能否在5S内甚至在更短时间内本身达到指定的控制量(温度)输出吗?以及,大部分加热装置不能制冷,如果PID控制器的输出控制量也就是温度,小于当前被控对象的温度,从分析上讲此时加热装置应该处于制冷状态,但是一般的加热器似乎做不到只能够让被控系统自然散热,这相当于改变了输出的控制量为0了,不符合实际的PID控制器输出。
1、不是振荡。振荡的图像会比较像三角函数的图像才对。
2、KP值和输出最大值相关,但是没有严格的、或者近似的线性相关关系,因为输出最大值还要受KI KD影响。KP值过大的时候无论KI KD如何都会不可避免地发生振荡,剧烈变化很正常。
3、没明白楼主要表达什么
4、KD没有表现出明显结果,一种情况是因为PID的计算速度相对于被控对象的反应速度来讲还是太快了。
有一种可能,即使楼主的T=5s,但是,加热装置能否在5S内甚至在更短时间内本身达到指定的控制量(温度)输出吗?以及,大部分加热装置不能制冷,如果PID控制器的输出控制量也就是温度,小于当前被控对象的温度,从分析上讲此时加热装置应该处于制冷状态,但是一般的加热器似乎做不到只能够让被控系统自然散热,这相当于改变了输出的控制量为0了,不符合实际的PID控制器输出。

 举报
举报