 作者:Gordon Cooper,Synopsys嵌入式视觉产品营销经理
作者:Gordon Cooper,Synopsys嵌入式视觉产品营销经理
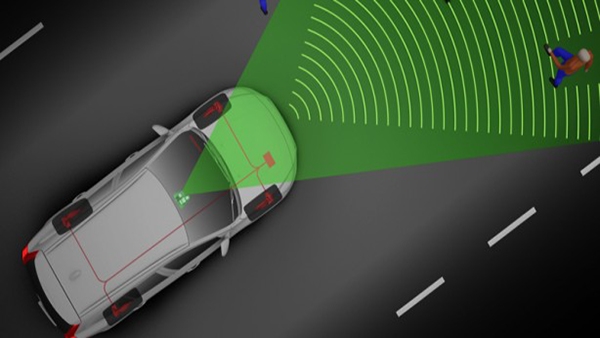
 图1:配备高性能视觉处理器的摄像头可以 “看到” 物体是否未在预期地点
图1:配备高性能视觉处理器的摄像头可以 “看到” 物体是否未在预期地点

 举报
举报
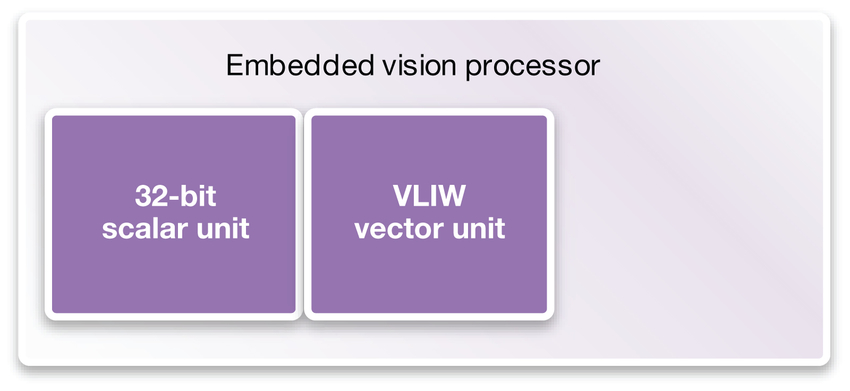 图2:视觉处理器基于异构处理单元,包括标量和极大指令字 (VLIW) 向量DSP单元
图2:视觉处理器基于异构处理单元,包括标量和极大指令字 (VLIW) 向量DSP单元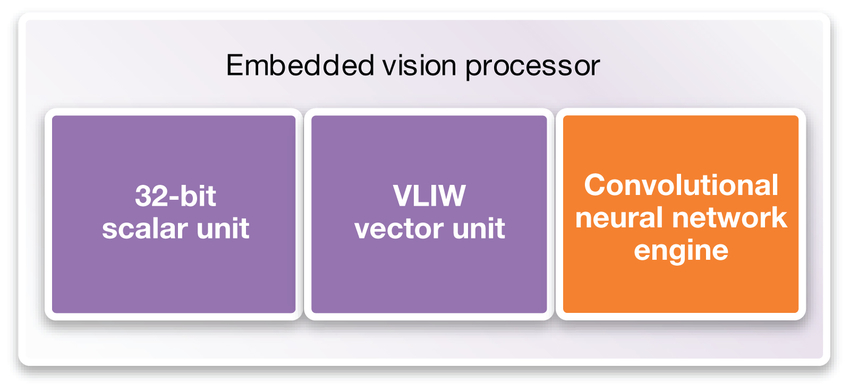 图3:向嵌入式视觉处理器添加CNN引擎可帮助系统通过训练而学习
举报
图3:向嵌入式视觉处理器添加CNN引擎可帮助系统通过训练而学习
举报
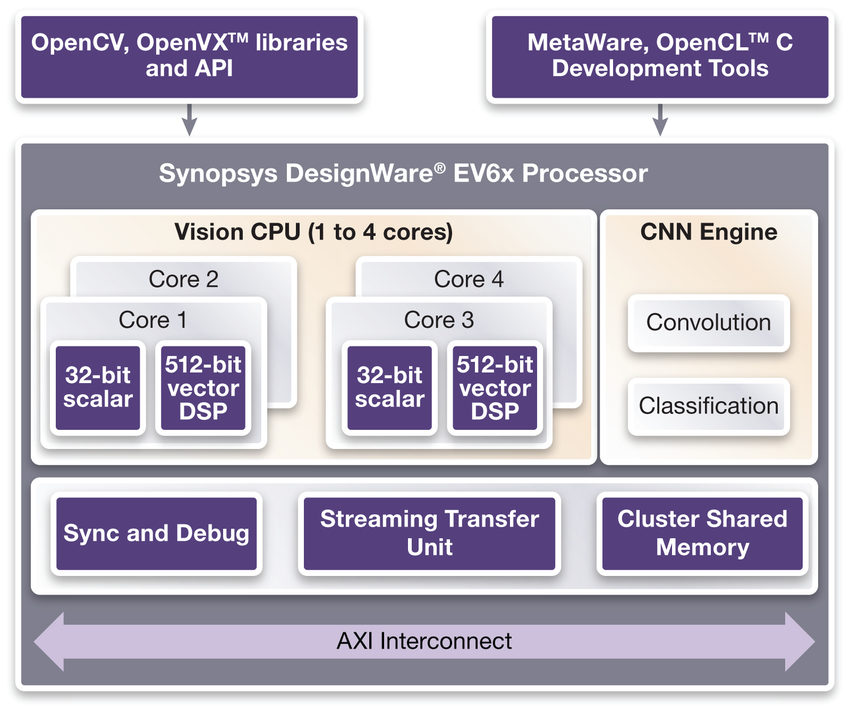 图4:DesignWare EV6x嵌入式视觉处理器包含用于预处理和后处理的标量、向量和CNN处理
举报
图4:DesignWare EV6x嵌入式视觉处理器包含用于预处理和后处理的标量、向量和CNN处理
举报
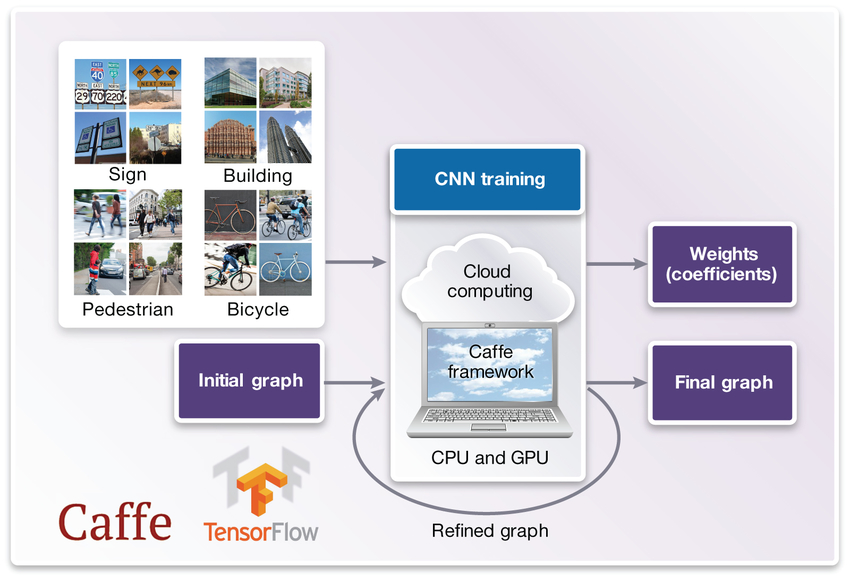 图5:图形训练所需的组件
图5:图形训练所需的组件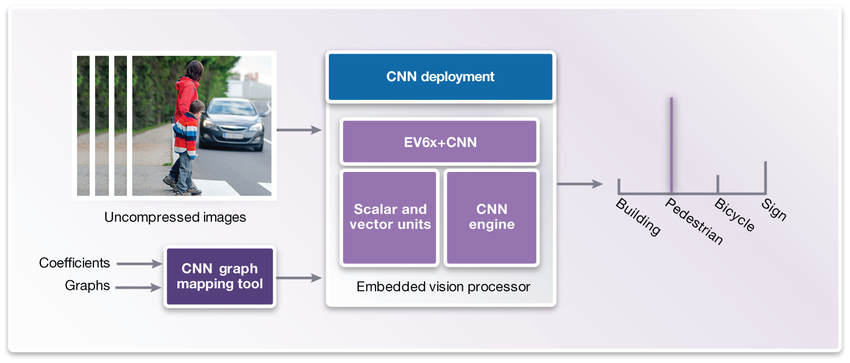 图6:嵌入式视觉处理器的输入和输出
举报
图6:嵌入式视觉处理器的输入和输出
举报
更多回帖


