模拟技术学习
登录
直播中
任黎平
7年用户
185经验值
私信
关注
[问答]
一种基于SIMULINK工具的太阳能电池阵列模拟器的仿真模型设计
开启该帖子的消息推送
ARM
0引言
目前,全球性的能源危机迫使越来越多的国家开始重视新能源的研究,光伏发电作为其中很重要的一种也得到了广泛研究。但是,由于光伏电池造价高,导致研究成本很高,不利于其初期的研究。因此,很有必要设计一种成本较低,能够代替实际光伏电池阵列来进行各种光伏实验的太阳能电池模拟器。
本文所设计的太阳能电池模拟器以BUCK
电路
为基础,采用
ARM
控制,并加入了电流PI控制方式来改善系统动态性能和稳态精度。此外,本文还采用四折线法来对光伏电池阵列的特性曲线进行分段拟合,并进行了
仿真
验证。
回帖
(5)
廉凌刚
2019-7-16 10:28:26
1系统设计目标
1.1太阳能电池板伏安特性曲线
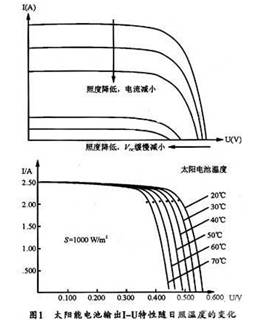
图1所示是太阳能电池板输出I-U特性曲线随日照、温度的变化情况。太阳能电池板模拟器需要能够模拟出不同温度、不同光照下的各种曲线,换言之,模拟器最终要能够模拟出许多条曲线。但是,某一时间下,日照强度和温度是一定的,在此时间下,输出曲线也只有一条符合要求。设计时可根据设定的日照强度和温度来计算确定输出哪一条曲线。实际做法是将不同日照、不同温度下的曲线计算出来后将其离散化,并以数据表的形式存入ARM控制器中。存入的曲线越多,所能覆盖的温度日照范围越广。
1.2太阳能电池板的工程数学模型
电池板出厂时都会给出短路电流、开路电压、最大功率点电流和电压这四个参数(ISC、VOC、Im和Vm),而且四个参数符合下列公式:
这样,就可将太阳能电池板的I-U特性曲线转换为便于工程计算的形式。
式(1)描述的是标准照度(Sref=1000W/m2)和标准温度(Tref=25℃)下的I-U曲线。一般情况下(照度S,温度T)的I-U方程可按照以下方法进行计算:
首先算出一般情况与标准情况下的温度差△T和相对照度差△S:
1系统设计目标
1.1太阳能电池板伏安特性曲线
图1所示是太阳能电池板输出I-U特性曲线随日照、温度的变化情况。太阳能电池板模拟器需要能够模拟出不同温度、不同光照下的各种曲线,换言之,模拟器最终要能够模拟出许多条曲线。但是,某一时间下,日照强度和温度是一定的,在此时间下,输出曲线也只有一条符合要求。设计时可根据设定的日照强度和温度来计算确定输出哪一条曲线。实际做法是将不同日照、不同温度下的曲线计算出来后将其离散化,并以数据表的形式存入ARM控制器中。存入的曲线越多,所能覆盖的温度日照范围越广。
1.2太阳能电池板的工程数学模型
电池板出厂时都会给出短路电流、开路电压、最大功率点电流和电压这四个参数(ISC、VOC、Im和Vm),而且四个参数符合下列公式:
这样,就可将太阳能电池板的I-U特性曲线转换为便于工程计算的形式。
式(1)描述的是标准照度(Sref=1000W/m2)和标准温度(Tref=25℃)下的I-U曲线。一般情况下(照度S,温度T)的I-U方程可按照以下方法进行计算:
首先算出一般情况与标准情况下的温度差△T和相对照度差△S:
举报
逯荣荣
2019-7-16 10:28:42
2系统原理及控制策略
2.1系统原理
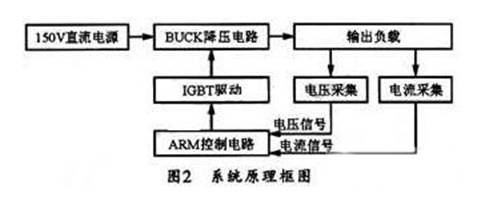
本系统的原理框图如图2所示,其中直流稳压电源可提供150V的恒定电压输出,然后通过BUCK降压电路把电压加在输出负载上,以实时采集负载两端的电压和电流,再经过控制电路的控制算法改变BUCK电路的PWM占空比,以把输出电压和电流控制在预想的I-U曲线上。
2.2系统控制策略
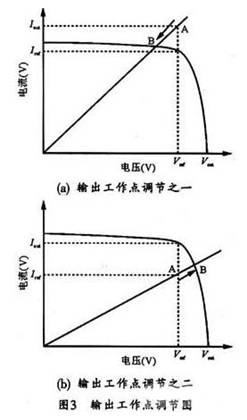
由于在某一环境条件下,电池板的输出伏安特性曲线只有确定的一条,这样,采集系统输出的电压电流,就可以得到输出负载的大小。其负载线与输出I-U曲线会有一个交点,这个点就是工作点,也就是图3中的B点。这一工作点将对应一个电流和一个电压。调节BUCK电路的PWM占空比,可使输出电压电流变换为工作点处的电压电流,从而达到调节的目的。
具体调节时,若采集的电压电流对应的负载工作点在(点A),曲线外时,可以减小占空比D。以减小输出电压,从而使工作点沿负载线向B点移动,此时B点就是想要的工作点;而当采集的电压电流对应的负载工作点在(点A),曲线内部时,则可增大占空比D,从而增大输出电压,使工作点沿负载线向B点移动。由于负载为阻性,所以,基于电压和基于电流的调节是等效的。本文由于输出电压的惰性,设计时采用了基于电流的调节方式。
当外部环境不变,也就是太阳能电池板的输出曲线不变时,若负载变化,则马上可以得到新的负载工作点,这样,按照以上方法调节占空比,也可使负载工作点沿负载线方向移动到我们想要的曲线上。
事实上,当负载不变,环境变化(也就是曲线变化)时,仍可按照事先存人的曲线数据把新的曲线调出来,然后与负载比较来得到新的工作点,之后仍按照以上方法调节占空比,使负载工作点沿负载线方向移动到我们想要的曲线上。
2系统原理及控制策略
2.1系统原理
本系统的原理框图如图2所示,其中直流稳压电源可提供150V的恒定电压输出,然后通过BUCK降压电路把电压加在输出负载上,以实时采集负载两端的电压和电流,再经过控制电路的控制算法改变BUCK电路的PWM占空比,以把输出电压和电流控制在预想的I-U曲线上。
2.2系统控制策略
由于在某一环境条件下,电池板的输出伏安特性曲线只有确定的一条,这样,采集系统输出的电压电流,就可以得到输出负载的大小。其负载线与输出I-U曲线会有一个交点,这个点就是工作点,也就是图3中的B点。这一工作点将对应一个电流和一个电压。调节BUCK电路的PWM占空比,可使输出电压电流变换为工作点处的电压电流,从而达到调节的目的。
具体调节时,若采集的电压电流对应的负载工作点在(点A),曲线外时,可以减小占空比D。以减小输出电压,从而使工作点沿负载线向B点移动,此时B点就是想要的工作点;而当采集的电压电流对应的负载工作点在(点A),曲线内部时,则可增大占空比D,从而增大输出电压,使工作点沿负载线向B点移动。由于负载为阻性,所以,基于电压和基于电流的调节是等效的。本文由于输出电压的惰性,设计时采用了基于电流的调节方式。
当外部环境不变,也就是太阳能电池板的输出曲线不变时,若负载变化,则马上可以得到新的负载工作点,这样,按照以上方法调节占空比,也可使负载工作点沿负载线方向移动到我们想要的曲线上。
事实上,当负载不变,环境变化(也就是曲线变化)时,仍可按照事先存人的曲线数据把新的曲线调出来,然后与负载比较来得到新的工作点,之后仍按照以上方法调节占空比,使负载工作点沿负载线方向移动到我们想要的曲线上。
举报
张峰
2019-7-16 10:28:51
3算法实现流程
采用数据表查表法时,程序在逼近工作点的过程通常需要一定时间,因为算法本身需要一个步进量,步进量的大小选取也是个问题,且方法复杂。而采用四折线法来实时计算工作点则具有计算量小,执行时间短等优点。
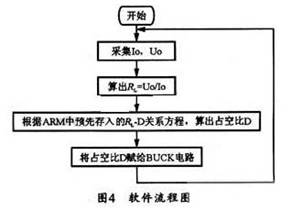
由太阳能电池板输出的伏安特性曲线可以看出,开路点和短路点处的曲线都比较平滑,故可用四条折线来模拟。在这四条折线的方程曲线中,某一负载电阻RL必然与这四条折线的一条相交。这样,就可以直接构造负载电阻RL与输出电流的关系方程,进而得到负载电阻RL与所需占空比D的关系方程。因此,在程序中只需计算一个除法和一个加法运算就可以得到所需的占空比D,实现起来简便易行。同样,如果需要多组曲线,只需构造多组折线方程预先存入ARM中就可以了。其程序执行流程图图4所示。
3算法实现流程
采用数据表查表法时,程序在逼近工作点的过程通常需要一定时间,因为算法本身需要一个步进量,步进量的大小选取也是个问题,且方法复杂。而采用四折线法来实时计算工作点则具有计算量小,执行时间短等优点。
由太阳能电池板输出的伏安特性曲线可以看出,开路点和短路点处的曲线都比较平滑,故可用四条折线来模拟。在这四条折线的方程曲线中,某一负载电阻RL必然与这四条折线的一条相交。这样,就可以直接构造负载电阻RL与输出电流的关系方程,进而得到负载电阻RL与所需占空比D的关系方程。因此,在程序中只需计算一个除法和一个加法运算就可以得到所需的占空比D,实现起来简便易行。同样,如果需要多组曲线,只需构造多组折线方程预先存入ARM中就可以了。其程序执行流程图图4所示。
举报
阎锐
2019-7-16 10:28:57
4SIMULINK仿真结果分析
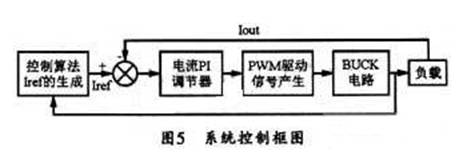
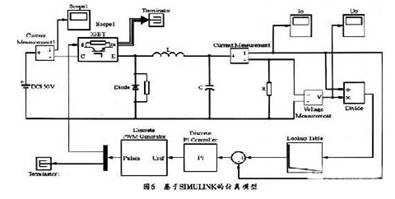
为了提高系统的响应速度,减小稳态误差,本设计在电流反馈中使用了PI控制。其控制框图如图5所示。根据本文的控制策略,从测得的输出电压电流可以得到输出负载RL,进而得到参考电流Iref。把该电流与实际输出电流相减再送人PI控制器中,然后用PI输出控制调节占空比,进而使实际输出电流与Iref一致。
图6是用SIMUUNK工具构造的仿真模型。用该系统模拟的太阳能电池板的最大输出功率为120W。由150V直流电源提供输入,经BUCK降压电路后加在负载RL上。再将测得的负载两端电压除以电流,就可得到输出负载RL的值。为了避免繁琐的计算,提高系统的响应速度,可以将打算输出的电池板的I-U曲线拟合成RL-Iref关系曲线。再做成LookupTable数据表。这样,通过查表就很容易得到参考电流Iref。如果想要拟合不同日照温度下的电池板的I-U曲线,只要把LookupTable的值进行相应的更换就可以了。
本文采用试凑法对PI控制器的参数进行了整定。首先将积分时间常数Ti取零,即取消积分作用,而采用纯比例控制。然后将比例增益P由小变到大,并观察系统响应,直至系统响应速度变快到一定范围的超调为止。之后再将积分时间常数Ti由大逐渐减小,使积分作用逐渐增强,这样,观察输出会发现系统的静差会逐渐减少直至消除。操作时可以反复试验几次,直到消除静差的速度满意为止。本设计最终选择P=200,Ti=2。
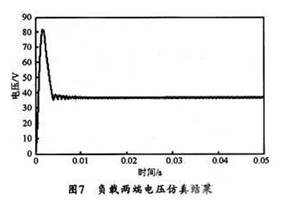
根据系统电压要求及BUCK电路特性可以算出电感L取2mH,电容C取100μF,ARM存入的I-U曲线的开路电压为40V,短路电流为3A。当取RL=24Ω时,根据光伏电池的I-U曲线,系统应输出36.54V电压,输出电流为1.524A,仿真后得到负载两端的电压波形如图7所示。
由图7可以看出,所得到的电压电流值刚好就是想要得到的I-V曲线上的点。系统从开机到稳定值的动态响应时间约为10ms,响应速度比较快。由于PI超调的作用,刚开始有一个明显的尖峰电压电流,在实际实验中,应在负载两端并联一个高耐压的小电容,以吸收尖峰电压。
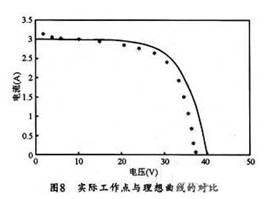
更换负载电阻的大小可使每个阻值对应一对电压电流值,也就是负载工作点。图8用符号‘*表示。把这些工作点与预存的光伏电池的I-U曲线相比可知,这些工作点大致在光伏电池I-U曲线附近,其多点仿真结果如图8所示。
4SIMULINK仿真结果分析
为了提高系统的响应速度,减小稳态误差,本设计在电流反馈中使用了PI控制。其控制框图如图5所示。根据本文的控制策略,从测得的输出电压电流可以得到输出负载RL,进而得到参考电流Iref。把该电流与实际输出电流相减再送人PI控制器中,然后用PI输出控制调节占空比,进而使实际输出电流与Iref一致。
图6是用SIMUUNK工具构造的仿真模型。用该系统模拟的太阳能电池板的最大输出功率为120W。由150V直流电源提供输入,经BUCK降压电路后加在负载RL上。再将测得的负载两端电压除以电流,就可得到输出负载RL的值。为了避免繁琐的计算,提高系统的响应速度,可以将打算输出的电池板的I-U曲线拟合成RL-Iref关系曲线。再做成LookupTable数据表。这样,通过查表就很容易得到参考电流Iref。如果想要拟合不同日照温度下的电池板的I-U曲线,只要把LookupTable的值进行相应的更换就可以了。
本文采用试凑法对PI控制器的参数进行了整定。首先将积分时间常数Ti取零,即取消积分作用,而采用纯比例控制。然后将比例增益P由小变到大,并观察系统响应,直至系统响应速度变快到一定范围的超调为止。之后再将积分时间常数Ti由大逐渐减小,使积分作用逐渐增强,这样,观察输出会发现系统的静差会逐渐减少直至消除。操作时可以反复试验几次,直到消除静差的速度满意为止。本设计最终选择P=200,Ti=2。
根据系统电压要求及BUCK电路特性可以算出电感L取2mH,电容C取100μF,ARM存入的I-U曲线的开路电压为40V,短路电流为3A。当取RL=24Ω时,根据光伏电池的I-U曲线,系统应输出36.54V电压,输出电流为1.524A,仿真后得到负载两端的电压波形如图7所示。
由图7可以看出,所得到的电压电流值刚好就是想要得到的I-V曲线上的点。系统从开机到稳定值的动态响应时间约为10ms,响应速度比较快。由于PI超调的作用,刚开始有一个明显的尖峰电压电流,在实际实验中,应在负载两端并联一个高耐压的小电容,以吸收尖峰电压。
更换负载电阻的大小可使每个阻值对应一对电压电流值,也就是负载工作点。图8用符号‘*表示。把这些工作点与预存的光伏电池的I-U曲线相比可知,这些工作点大致在光伏电池I-U曲线附近,其多点仿真结果如图8所示。
举报
更多回帖
rotate(-90deg);
回复
相关问答
ARM
低成本
太阳能电池
模拟器
怎么实现?
2019-08-16
2730
太阳能电池
模拟器
的实现原理是什么?
2019-08-15
2870
石墨烯在
太阳能电池
板的应用
2019-07-16
3072
求
一种
基于plc的
太阳能电池
板跟踪系统的解决方法
2021-08-09
2289
如何使用Arduino的
太阳
追踪
太阳能电池
板?
2021-10-26
2342
太阳能电池
板
能
和铅蓄
电池
不能在proteus中
仿真
么?
2015-05-06
20720
如何标准测试仪器测量
太阳能电池
的功率输出?
2021-04-09
1973
求
太阳能
存储相关方案
2013-01-01
4678
太阳能电池
板
2016-09-06
8999
灯光能给
太阳能电池
充电吗?
2015-10-30
14433
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分



 举报
举报