在比较之前,需要对实际的光耦TLP521的几个特性曲线作一下分析。首先是Ic-Vce曲线,如图5,图6所示。
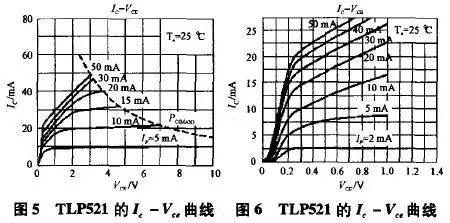
由图5、图6可知,当If小于5mA时,If的微小变化都将引起Ic与Vce的剧烈变化,光耦的输出特性曲线平缓。这时如果将光耦作为
电源反馈网络的一部分,其传递函数增益非常大。对于整个系统来说,一个非常高的增益容易引起系统不稳定,所以将光耦的静态工作点设置在电流If小于5mA是不恰当的,设置为5~10mA较恰当。
此外,还需要分析光耦的Ic-If曲线,如图7所示。
由图7可以看出,在电流If小于10mA时,Ic-If基本不变,而在电流If大于10mA之后,光耦开始趋向饱和,Ic-If的值随着If的增大而减小。对于一个电源系统来说,如果环路的增益是变化的,则将可能导致不稳定,所以将静态工作点设置在If过大处(从而输出特性容易饱和),也是不合理的。需要说明的是,Ic-If曲线是随温度变化的,但是温度变化所影响的是在某一固定If值下的Ic值,对Ic-If比值基本无影响,曲线形状仍然同图7,只是温度升高,曲线整体下移,这个特性从Ic-Ta曲线(如图8所示)中可以看出。
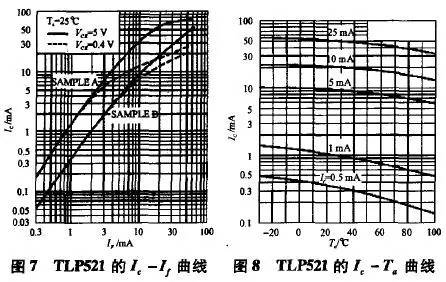
由图8可以看出,在If大于5mA时,Ic-Ta曲线基本上是互相平行的。
根据上述分析,以下针对不同的典型接法,对比其特性以及适用范围。本研究以实际的隔离半桥辅助电源及反激式电源为例说明。
第1种接法中,接到电压误差放大器输出端的电压是外部电压经电阻R4降压之后得到,不受电压误差放大器电流输出能力影响,光耦的工作点选取可以通过其外接电阻随意调节。
按照前面的分析,令电流If的静态工作点值大约为10mA,对应的光耦工作温度在0~100℃变化,值在20~15mA之间。一般PWM芯片的三角波幅值大小不超过3V,由此选定电阻R4的大小为670Ω,并同时确定TL431的3脚电压的静态工作点值为12V,那么可以选定电阻R3的值为560Ω。电阻R1与R2的值容易选取,这里取为27k与4.7k。电阻R5与电容C1为PI补偿,这里取为3k与10nF。
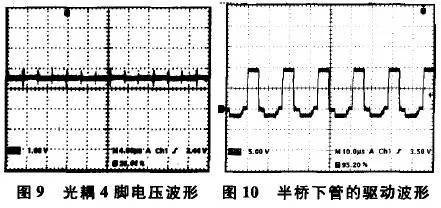
实验中,半桥辅助电源输出负载为控制板上的各类控制芯片,加上多路输出中各路的死负载,最后的实际功率大约为30w。实际测得的光耦4脚电压(此电压与芯片三角波相比较,从而决定驱动占空比)波形,如图9所示。对应的驱动信号波形,如图10所示。
图10的驱动波形有负电压部分,是由于上、下管的驱动绕在一个驱动磁环上的缘故。可以看出,驱动信号的占空比比较大,大约为0.7。
对于第2种接法,一般芯片内部的电压误差放大器,其最大电流输出能力为3mA左右,超过这个电流值,误差放大器输出的最高电压将下降。所以,该接法中,如果电源稳态占空比较大,那么电流Ic比较小,其值可能仅略大于3mA,对应图7,Ib为2mA左右。由图6可知,Ib值较小时,微小的Ib变化将引起Ic剧烈变化,光耦的增益非常大,这将导致闭环网络不容易稳定。而如果电源稳态占空比比较小,光耦的4脚电压比较小,对应电压误差放大器的输出电流较大,也就是Ic比较大(远大于3mA),则对应的Ib也比较大,同样对应于图6,当Ib值较大时,对应的光耦增益比较适中,闭环网络比较容易稳定。
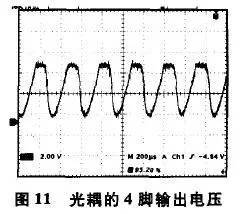
同样,对于上面的半桥辅助电源
电路,用接法2代替接法1,闭环不稳定,用示波器观察光耦4脚电压波形,有明显的振荡。光耦的4脚输出电压(对应于UC3525的误差放大器输出脚电压),波形如图11所示,可发现明显的振荡。这是由于这个半桥电源稳态占空比比较大,按接法2则光耦增益大,系统不稳定而出现振荡。
实际上,第2种接法在反激电路中比较常见,这是由于反激电路一般都出于效率考虑,电路通常工作于断续模式,驱动占空比比较小,对应光耦电流Ic比较大,参考以上分析可知,闭环环路也比较容易稳定。
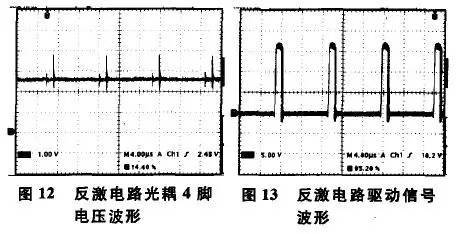
以下是另外一个实验反激电路,工作在断续模式,实际测得其光耦4脚电压波形,如图12所示。实际测得的驱动信号波形,如图13所示,占空比约为0.2。
因此,在光耦反馈设计中,除了要根据光耦的特性参数来设置其外围参数外,还应该知道,不同占空比下对反馈方式的选取也是有限制的。反馈方式1、3适用于任何占空比情况,而反馈方式2、4比较适合于在占空比比较小的场合使用。


 举报
举报


