四开关Buck-Boost变换器的讨论
在非隔离电源方案中,Buck、Boost、Buck-Boost电路应用非常广,很多工程师对这三种电路非常熟。下面我们一起聊聊四开关Buck-Boost电路。
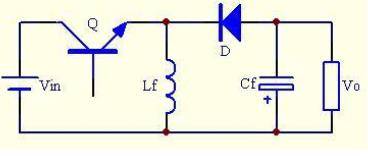
常规的Buck-Boost电路,Vo=-Vin*D/(1-D),输出电压的极性和输入电压相反。
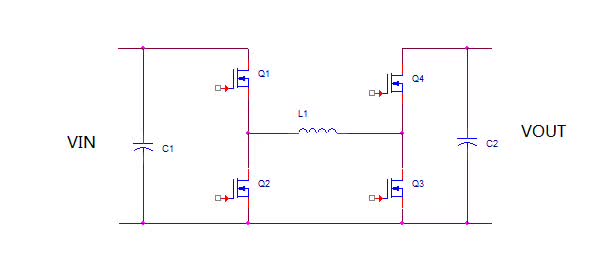
简要的四开关Buck-Boost电路,Vo=Vin*D/(1-D),输出电压的极性与输入电压相同。
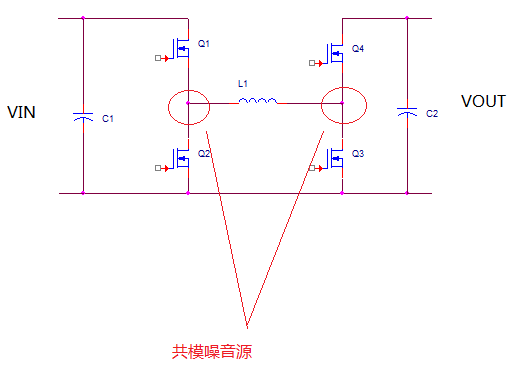
四开关buck-boost的拓扑很简单,如下图。
对于四开关buck-boost,它本身有一种非常传统简单的控制方式。
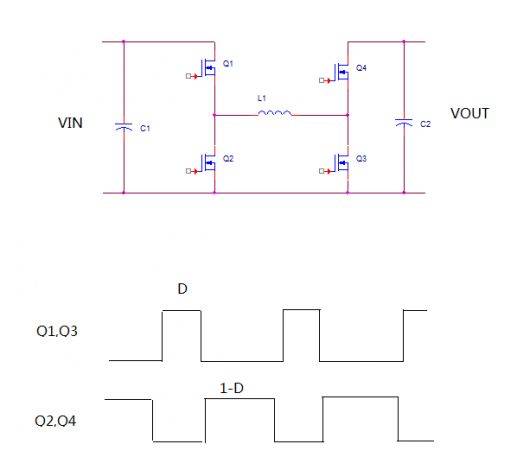
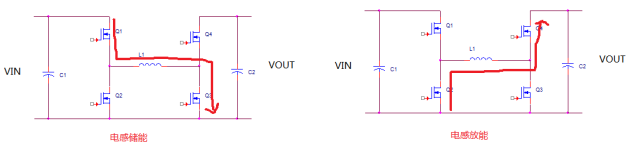
那就是Q1和Q3同时工作,Q2和Q4同时工作。并且两组MOS交替导通,如上图。
如果把Q2和Q4换成二极管,那么也是同样能工作,只不过没有同步整流而已。
对于这种控制方式,在CCM情况下我们可以得到公式:
Vin*D=Vout(1-D)也就是说,Vout=Vin*D/(1-D). 这个电压转换比和我们常见的buck-boost是一样的。
只不过常见的buck-boost的输出电压是负压,而四开关输出的是正压。
但是这种控制方式的优点是简单,没有模态切换。但是缺点是,四个管子都在一直工作,损耗大,共模噪音也大。
基于传统控制方式的缺点。多年前,一家知名的IC公司推出了一款控制IC,革新了这个拓扑的控制方式。
其思路就是当Vin〉Vout的时候,把这个拓扑当纯粹的BUCK来用,当Vin

但是,这种思路本身没什么奇特之处。真正有技术含量的是,当VIn=Vout的时候,采用怎么样的控制方式?
从buck过渡到中间模态,再过渡到boost的时候,如何做到无缝切换? 这几个问题,后来成为各家IC公司,大开脑洞,争夺知识产权的战场。
接下来,我来介绍某特公司的IC的控制逻辑。
先假设输出为固定的12V,输入假设为一个电池,充满电电压为16V,放电结束电压为8V。
那么从输入16V开始,此时的工作状态显然是BUCK
那么四个管子的驱动信号如下图
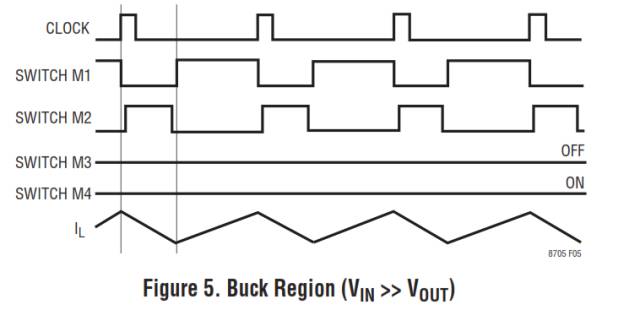

那么当输入电池电压逐渐开始降低,M1的占空比也逐渐开始增大,而M2的占空比开始减小。
此时M2的占空比是个关键的参数。
因为IC内部对M2的脉宽有个最小设定,假如说是200ns。
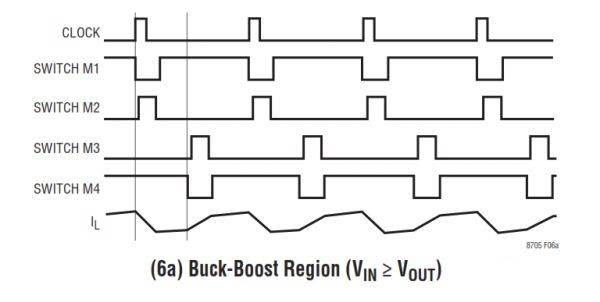
那么现在假设输入电压掉到12.5V,而M2的脉宽也收缩到了200ns。IC内部的逻辑电路就认为到了模态切换的时候了。
此时发生的变化是,M3和M4两个管子不再是常关和常通的状态,而是开始开关了。
如果我们把上图进行分解,就会发现一个有趣的现象,就是在一个clock周期里面,前半周期是buck,后半周期是boost
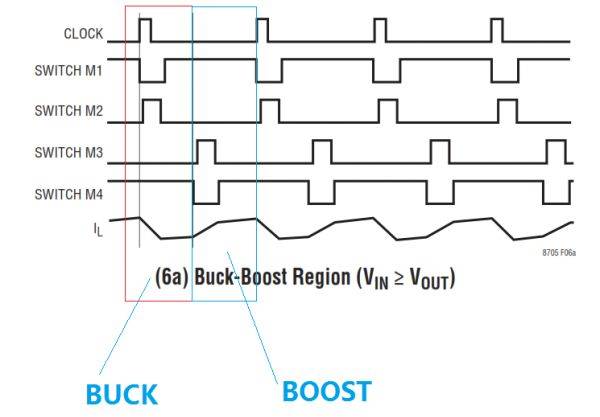
这个时候boost切进去的时候,M3是以最小占空比切入的,而且该占空比不可调。
此时M2的占空比则会从最小突然展宽以抵消boost模特切入的影响。在这个时候,输出会产生一个动态效应。
那么当输入继续下降的时候,M2的占空比会继续减小。
那么当M2再度回到最小占空比的时候,IC内部逻辑电路会认为模态需要再次转换了。
此时,M2将固定在最小占空比,而M3则开始跳出最小占空比,可以逐渐展宽。理论上来说,这个过渡应该是完全无缝的切换,
但是由于芯片内部的clock时序的切换,也会对输出造成一种动态效应。
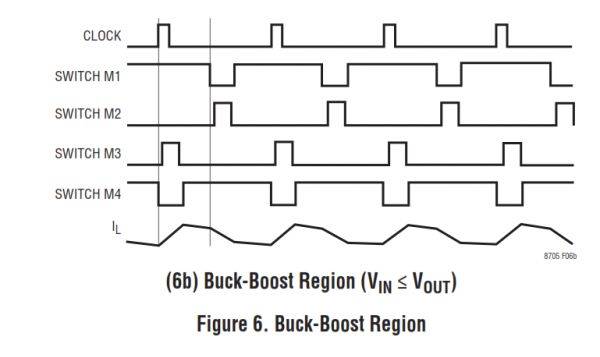
这个时候,变成了前半周期是boost,后半周期是buck。
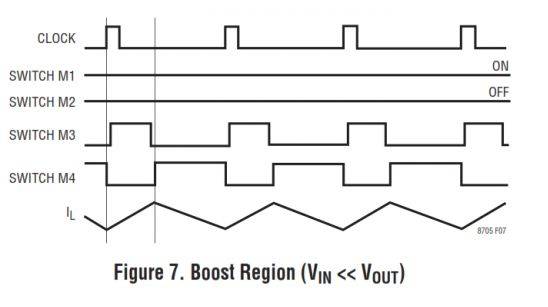
同样,当输入电压继续降低的时候,电路会切入完全的boost模态。
当然另外一家IC巨头,某某仪器公司也有类似的IC,他们最大的区别,就是在buck-boost这个模态。
某某仪器的IC,在buck-boost模态,是一个周期是buck,下一个周期是boost,如此轮回。而某某尔特公司的IC却是在一个周期内,前半周期是buck,后半周期是boost。
总的来说,两家异曲同工。
 3
3
 举报
举报
 1
举报
举报
1
举报
举报
更多回帖

