
![]()
![]()
DSD 英飞凌 变压器 接口
摘要:日前,永磁伺服同步电机的使用越加的广泛,而MCU迅速发展使得电机伺服系统设计方案越来越简单可靠。伺服控制电机需要位置反馈,与传统的位置传感器想比,旋转变压器更容易维护,适合在环境恶劣的工况下工作。本文基于英飞凌推出的新一代M4处理器完成了带旋转变压器伺服控制系统的硬件设计和软件设计;系统选用的是英飞凌新一代的处理器XMC4500,文章具体介绍了旋转变压器原理,以及旋变解调的硬件电路设计。
关键词:永磁伺服;MCU;旋转变压器,旋变解调,接口设计
0 引言
永磁伺服同步电机调速系统磁场定向控制中,电机位置速度的反馈对实现速度闭环极为重要。电机反馈传感器在很大程度上决定了运动控制的的性能,传感器的误差限制了位置速度的精度。目前检测电机速度的方法也有多种,如光电编码器,霍尔传感器,旋转变压器。旋转变压器输出的是含有位置信号的模拟信号,工作可靠,寿命长,对机械噪声不敏感,适合应用在高温潮湿,震动等环境恶劣的工况下。旋转变压器需要高频正弦激励信号,输出的模拟信号也是高频的,需要对其信号解调才能获得转子的位置信息。传统的信号解调方法是使用解码芯片,常用的解码芯片有AD2S90,AS2S99,AD2S1200 等等。但是这些专用的芯片对模通常价格比较昂贵。Infineon公司新推出的 Xmc4500 内置Delta-Sigma 解调功能,是该微控制器的一大特色,利用这一功能可以十分方便的支持旋转变压器。本文基于XMC4500设计了旋变方案的伺服驱动系统。
1旋转变压器解调原理
1.1旋转变压器简单介绍
本文采用的是多摩川旋变,型号为:TS4746N3220E501 励磁电压要求10KHZ, 幅值为7V。旋转变压器由励磁绕组和次边输出绕组组成,如图(1)所示, 是励磁绕组,
是励磁绕组, ,
, 是输出绕组。输出电压和转子位置关系表达式:
是输出绕组。输出电压和转子位置关系表达式:
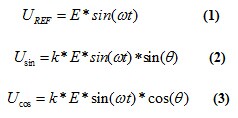
其中K 是变压比,  是角速度, =2*pi*f,f 即励磁电压的频率,E是励磁电压幅值,
是角速度, =2*pi*f,f 即励磁电压的频率,E是励磁电压幅值, 即转子的角度。由上式可知,当在励磁绕组上施加励磁电压后,随着转子的角度在输出绕组上就产生了含有转子位置信息的 , 波形。如图2所示。
即转子的角度。由上式可知,当在励磁绕组上施加励磁电压后,随着转子的角度在输出绕组上就产生了含有转子位置信息的 , 波形。如图2所示。

图 1 旋转变压器示意图

图2 旋转变压器励磁以及输出电压波形
1.2 传统旋转变压器解调原理
图3是传统旋转变压器解调原理图。旋转变压器的输出信号与估计位置角 的正余弦值相乘,得到:
的正余弦值相乘,得到:
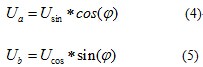
将两者求差得到:

(6)式在经过检波器得到位置误差信息,再积分激励压控振荡器,压控振荡器再引起计数器的上下计数得到位置。
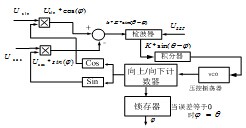
图3传统旋转变压器解调原理图
1.3 XMC4500 DSD解调原理
由表达式(1),(2),(3)可以得出旋转变压器的输出绕组含有转子位置信息。XMC4500内置DSD数字处理部分,能解调旋变反馈信号,并支持旋变励磁信号产生。旋转变压器反馈信号经模数转换器后将数字比特率流信号送至XMC4500解调变可以得到转子的角度信息了。XMC4500的DSD功能使得软件开发非常的简单,只要合理配置寄存器便可以求出角度。图4是DSD解调详细过程。在一个载波周期内对旋转变压器的反馈信号进行N点抽样,根据载波的符号对抽样值进行整形。载波符号波形即为载波同频率的方波:
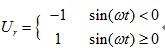
因此参考信号和输入信号相乘得到:
即为图4中的波形4所示。将 傅里叶展开
傅里叶展开

则(以一路sin信号为例):

经过低通滤波滤除高频信号可以得到与输入信号包络信号成正比的信号即图4中的第六个波形:
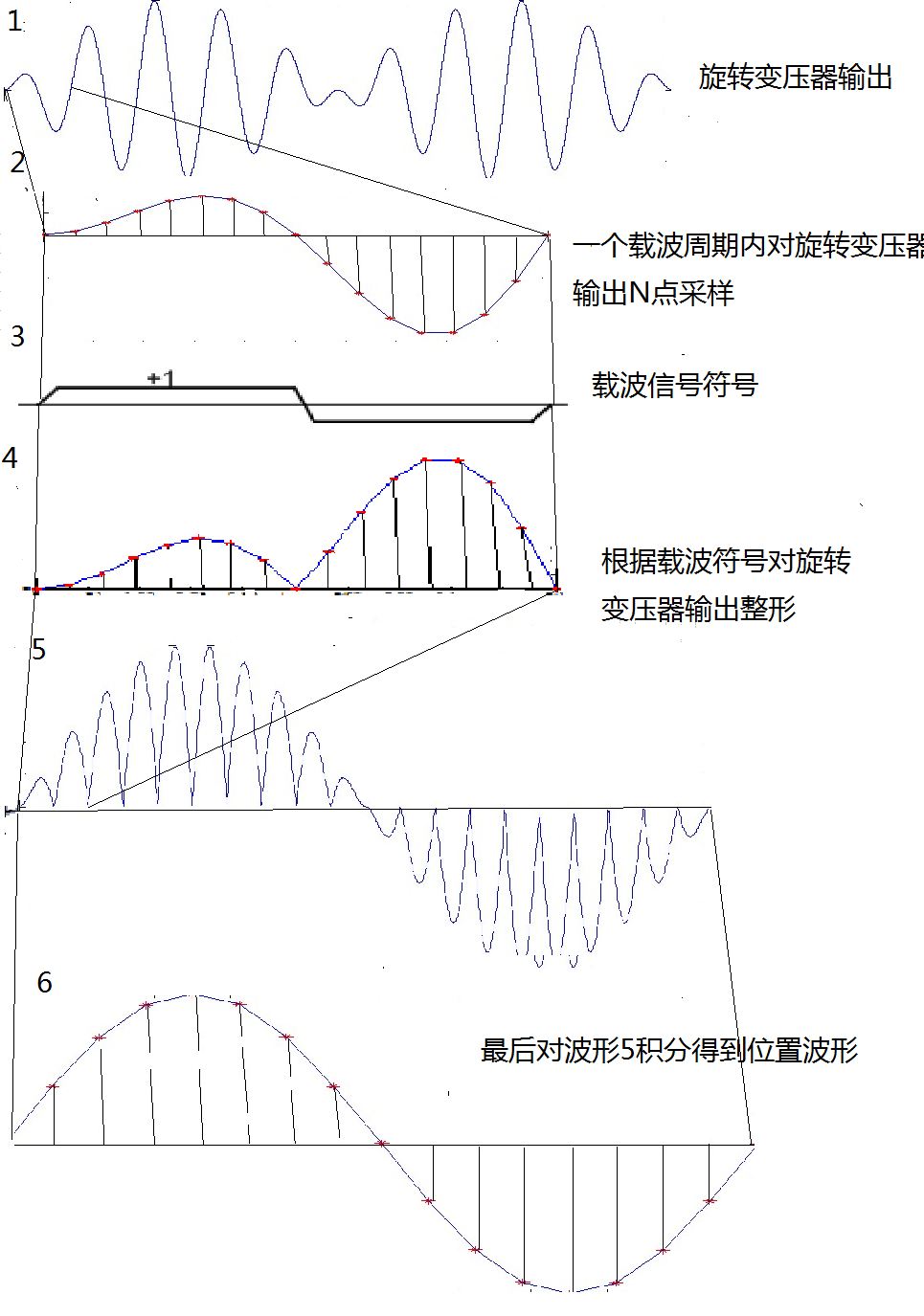
图4 旋转变压器信号解调过程
1.4锁相环原理
为了得到更精确的角度信息,让 经过PLL锁相环实现相同步。PLL锁相环原理如图所示:
经过PLL锁相环实现相同步。PLL锁相环原理如图所示:
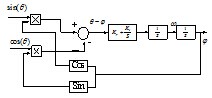
图5 PLL锁相环原理
即为所求得得角度。首先利用三角函数关系以及 (当 为很小值时),得到角度误差
(当 为很小值时),得到角度误差 ,进过PI调节器以及第一个积分得到速度 ,速度再积分即得到角度 。合理调节PI参数可以保证 精确度和响应速度。
,进过PI调节器以及第一个积分得到速度 ,速度再积分即得到角度 。合理调节PI参数可以保证 精确度和响应速度。
2 旋变方案硬件设计
2.1 旋转变压器参考电路
传统的旋变解决方案需要用到轴角变换芯片,而这种芯片的成本却非常的高,使用XMC4500的DSD功能 ,则外面只需要Delta-Sigma调制器即可。旋变模拟反馈信号需要模数转换器再xmc4500DSD单元,这里采用的是ti ADS1205 delta-sigma调制器,其参考电路框图和模拟原理如图6a,b所示。
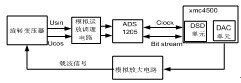
图6(a)DSD解调电路参考框图

图6(b)旋变信号(sin/cos)的处理电路
2.2 XMC4500DSD解调的优点
传统旋转变压器解调方法通常使用硬件RDC技术,简化的RDC原理示意图如前面图3所示,为得到位置信息,必须对计数脉冲进行计数。计数脉冲的最高频率是有限的,这个值限制了检测电机的最高速度。多数硬件RDC分辨率只有10,12,14,16位。但xmc4500DSD应用软件解调,其用法与硬件RDC用法类似,但软件RDC具有很多优点。其一软件RDC的带宽可以通过软件改变,而硬件RDC的带宽很难改变,它是通过几个有源部件来设定的。用户需根据产商提供的RDC带宽来选择。带宽设置的太高,受到的噪声影响大。带宽设置的太低,RDC相位滞后太大;其二,用软件取代硬件RDC降低了驱动器成本,往往RDC是驱动器控制部分最昂贵的部件。
3 实验结果
本文选择的实验电机参数是华大电机110ST-M02030LFB,额定转矩Tn=2.0Nm,额定转速 =3000rpm,额定电流
=3000rpm,额定电流 =4.0A,转动
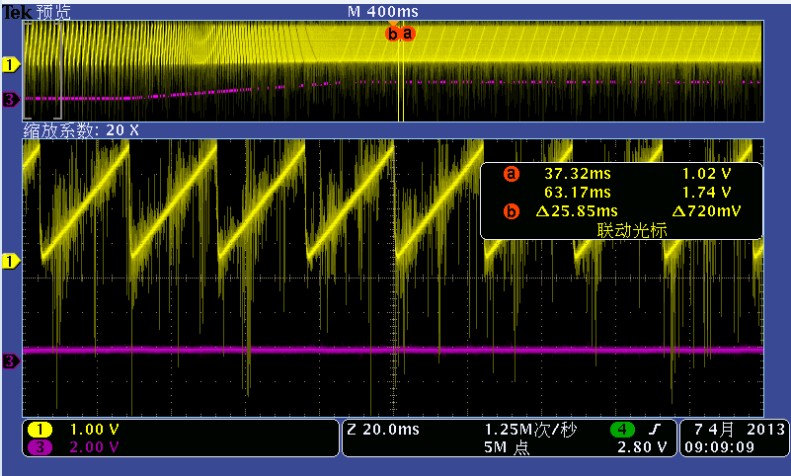
=4.0A,转动 。图7是电机运转时转速(示波器通道3)和转子位置波形图(示波器通道1). 图7上部分是转子升速时转速和位置变化。下方时转子转速为2400rpm时的局部放大图。由图可知从旋转变压器解调出来的转子角度信息是正确的,实现了转速电流的双闭环。
。图7是电机运转时转速(示波器通道3)和转子位置波形图(示波器通道1). 图7上部分是转子升速时转速和位置变化。下方时转子转速为2400rpm时的局部放大图。由图可知从旋转变压器解调出来的转子角度信息是正确的,实现了转速电流的双闭环。
4结束语
本文基于英飞凌xmc4500设计实现了旋变解调方案下的伺服控制。证明了英飞凌xmc4500DSD单元的可实用性。软件解调的与传统方案相比,本文方案不仅在成本上有很大的节约,而且软件解调更加的灵活。英飞凌xmc4500 DSD给伺服用旋转变压器设计带来了很大方便改善。
参考文献:
[1] 董恒,王辉,黄科元.永磁同步电机驱动系统数字PI调节器参数设计【J】.电气传动,2009.
[2] 王莉娜,杨宗军. SIMULINK 中PMSM模型的改进及在参数辨识中的应用.【J】电机与控制学报.2012
[3] 王冉珺,刘恩海. 永磁伺服电机转子初始位置检测.【J】电机与控制学报.2012
[4] 陈伯时.电力拖动自动控制系统----运动控制系统【M】.第3版.北京:机械工业出版社,2003
[5]XMC4500 Microcontroller series for industrial application.
更多回帖

