![]()
![]()
无线传感 matlab
3.3 目标预测
目标预测实质是根据目标运动的当前测量数据或历史记录信息确定目标的运动特征,然后结合目标的当前位置.速度等信息预测目标未来的位置.如图3 所示,假设目标沿曲线L 运动,在ti – 1 时刻利用式(6)获得目标位置(xi- 1,yi-1),经Δti=ti-ti-1后目标运动到位置(xi,yi),现需预测在目标经Δti+1=ti+1-ti后在ti+1时刻的位置的坐标(xi+1,yi+1),位移为S.若能求得Δx 和Δy,则可预测(xi+1,yi+1)的值.
目标运动在ti时刻的速度vi可以表示为:
¥78..
其中i为集合F中的项数,v0=v(‘ v’表示极值点的速度).一般采集信息的频率相同,所以各阶段的Δtj相同,且等于采样时间频率.对频率不同时,此方法照常使用.
目标在ti时刻的加速度ai为:
利用目标做直线运动的原理,设直线方程为yk = bxk + c,通过最小二乘法可以求出参数b 的值.因b 为直线的斜率,有:
3.4 目标丢失的恢复策略
任何预测都不能达到与实际完全一致的轨迹,当运动轨迹预测值偏离过大或目标突然发生较大的变化(例如突然加速)时,致使当前活动节点不能监测到目标,这种现象称为目标丢失,需要有一定的目标恢复策略尽早寻找到目标以便重新跟踪目标.目标失踪的区域可以分为两种:
(1)目标运动到主簇头和辅助簇头监测区域之外,预备簇头监测区域之内;(2)目标运动到预备簇头监测范围之外.
当情况(1)发生时,主簇头接收不到目标的信号,它立刻发送目标丢失的消息,若此时某个辅助簇头和预备簇头能接收到目标信号,此时目标并没有失踪,则选择信号强的簇头点作为主簇头重新建立跟踪体系;当情况(2)发生时,说明目标已远离当前活动区域,此时以主簇头为中心,逐跳唤醒簇头和簇内节点进行跟踪.若某个簇头节点监测到目标的信息,则以该簇头节点为主簇头重新建立跟踪体系.当所有的簇头节点都监测不到目标信号时说明该目标离开监测区域,恢复初始状态,除哨兵节点之外,其余节点睡眠.
4 仿真实验及结果分析
4.1 仿真环境
为了验证本文算法的有效性以及在定位精度和目标丢失率方面的优势,利用matlab 软件对本文算法进行仿真.仿真场景设置[2,7]为:在100 m×100 m的二维监控区域内随机散布400 个传感器节点,其中网格的边长为10 m,通信半径r1为20 m,感知半径r2为30 m;传感器节点的初始能量E0均为1 J.设目标做匀加速运动,运动轨迹为无规则曲线,其中初速度v0 = 3 m/s,a = cos ti m/s2,采样频率为5 Hz,采样时间为6 s.在此条件下分别对本文算法.宋超凡,董慧颖。基于传感器网络的分段线性拟合跟踪算法研.和任静,熊庆宁。一种基于预测策略的目标跟踪算法研究[J]传感中的算法进行仿真.
4.2 跟踪效果分析
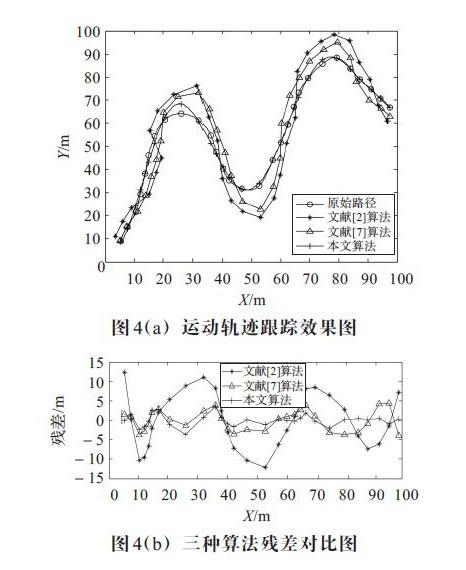
图4(a)为三种算法的运动轨迹跟踪效果图,在预测数据的运用方面,本文算法利用一段内趋势相同的数据集合,目标在一个簇内运动时产生的数据集合,相邻的前两个数据信息,而且本文算法中采用二次定位,相对于定位精度更高,所以跟踪效果显示出明显的优势.图4(b)为三种算法的残差比较,更好地体现三种算法的跟踪性能,本文算法具有较高的跟踪精度.
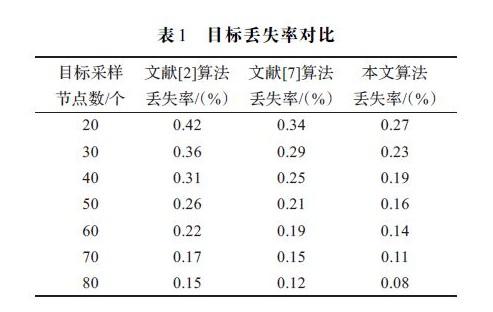
当目标的速度或采样的频率改变后会使目标采样的个数随之改变.仿真过程中改变运动速度和采样频率来研究不同采用个数时三种算法的目标丢失率.设获得的采样个数分别为20.30.40.50.60.70.80,得表1 所示结果.
4.3 性能随参数变化情况分析
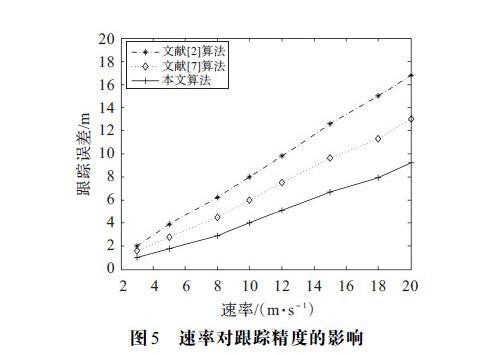
目标的运动速度会改变采样个数,从而对跟踪精度产生影响.在采样频率相同的前提下,目标运动速度越快,得到的采样个数越少,致使跟踪精度降低,特别在目标运动到极值点处时.图5 为三种算法在不同速度时跟踪精度的变化情况,可见速度越大误差越大,但本文算法相对于其余两种变化趋势缓慢,具有较高的跟踪.
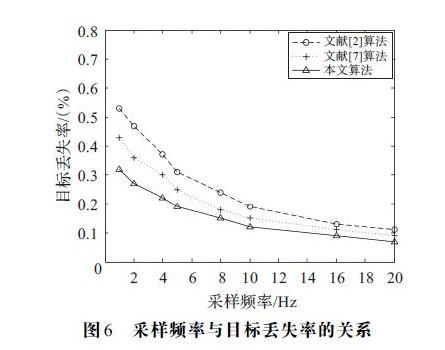
分别取采样频率为{1.2.4.5.8.10.16}(Hz)时,观测采样频率与目标丢失率之间的关系.如图6 所示,三种算法中当采样频率增大时目标丢失率均减小.由于本文算法在采样个数较少的情况下也能很好地跟踪目标,并能预测目标位置,并且由于本文引入有效的目标恢复机制,所以目标丢失率相对于其余两种较低.
5 结束语通过分析目前目标跟踪算法的不足,考虑到线性拟合跟踪算法对网络中信息的利用不够充分,基于簇结构的算法只局限于簇内预测,本文通过预测数据选取及多簇头协作定位预测对目标运动进行跟踪.当目标丢失时为尽快地恢复跟踪,提出有效的目标恢复机制,算法仿真结果表明定位跟踪精度有所提高.
更多回帖