电容触摸 传感器
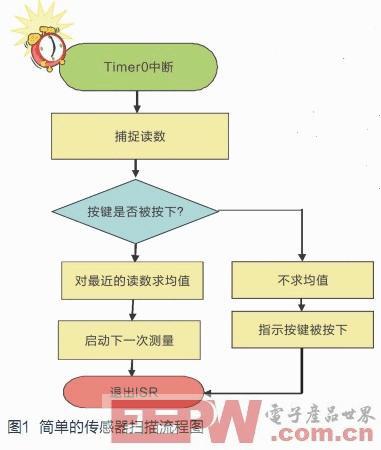
考虑到美观、整洁和成本效益等方面的因素,在包括消费类电子 产品、家用电器等在内的许多电子产品中,应用正变得越来越流行。本文将讨论与触摸传感">电容触摸传感工作相关的基本概念,以及如何简便地实现电容触摸传感">电容触摸传感功能。电路 的充电速率(等于时间常数τ)。第三个公式(见公式3)说明并联电容的总电容值等于两者相加。单片机 中输入传感器读数)来检测电容变化。硬件将利用公式2(充电时间公式)的某种形式向单片机传达传感器读数。ti mer0决定固定的时间周期T,在该时间周期内,将测量进入Timer1捕捉模块的正边沿数量,然后它产生一个频率测量值。正边沿数量越多,说明频率越高。准备好获取测量值时,Timer0发生溢出以触发中断,而Timer1会测量正边沿数量。流程图的“捕捉读数”框显示了何时获取读数。
更多回帖