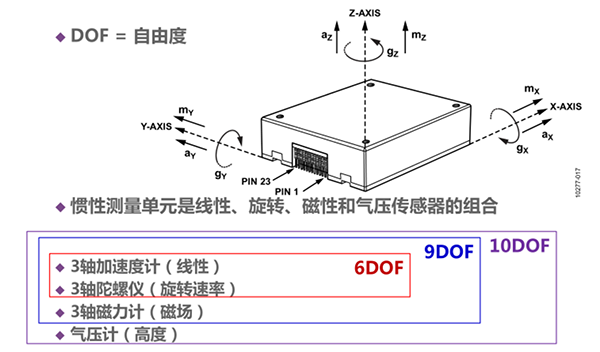
 这些器件带有一个三轴加速度计,显然这是指x轴、y轴和z轴。 加速度计会测量线性速度的变化,也会响应重力。
这些器件带有一个三轴加速度计,显然这是指x轴、y轴和z轴。 加速度计会测量线性速度的变化,也会响应重力。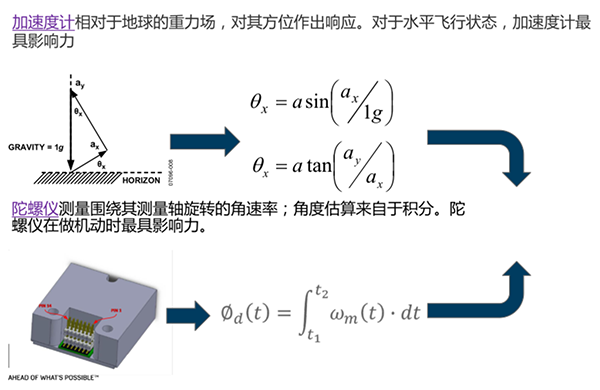 陀螺仪对旋转角速率进行积分,您就能估算角位移。 大致上说,加速度计具有很好的长期偏置稳定性和长期精度,但会对线性振动作出响应。 当进行角度估计时,线性振动会表现出来,有时候需要滤波,这会给其他方面带来负担,或者有时候振动太高,超出加速度计测量范围,从而完全破坏角度估计。
陀螺仪对旋转角速率进行积分,您就能估算角位移。 大致上说,加速度计具有很好的长期偏置稳定性和长期精度,但会对线性振动作出响应。 当进行角度估计时,线性振动会表现出来,有时候需要滤波,这会给其他方面带来负担,或者有时候振动太高,超出加速度计测量范围,从而完全破坏角度估计。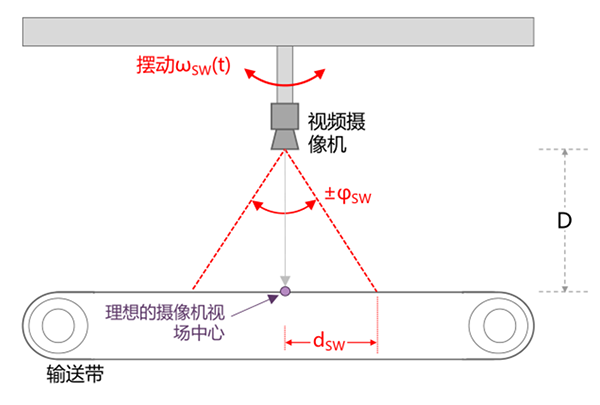 知道该类运动存在并考虑物理位移与实际角度摆动位移之间的简单几何关系,您就可以把它表示成物理术语,并与系统的实际参数联系起来。
知道该类运动存在并考虑物理位移与实际角度摆动位移之间的简单几何关系,您就可以把它表示成物理术语,并与系统的实际参数联系起来。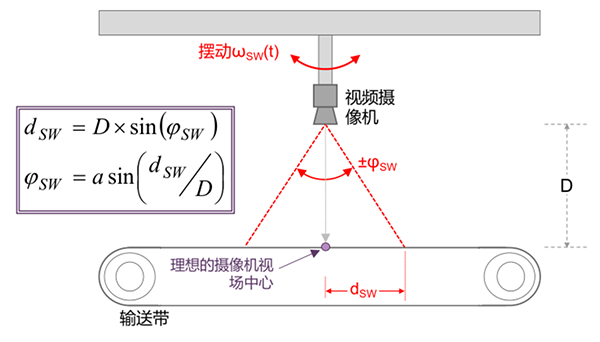 运动控制涉及各种各样的应用。 假设把摄像机,也就是摄像机上的实际成像元件,放在一个小型伺服电机上,它将能抵消摆动效应。 当摄像机向左摆动时,伺服电机向右摆动,这样,接收物件表面光线的成像元件实际上没有运动,图像就不会失真。 这就是成像稳定技术, 现在已经相当普遍。 过去它只用在高端摄像机上,现在由于MEMS技术,大量数码摄像机也已采用。
运动控制涉及各种各样的应用。 假设把摄像机,也就是摄像机上的实际成像元件,放在一个小型伺服电机上,它将能抵消摆动效应。 当摄像机向左摆动时,伺服电机向右摆动,这样,接收物件表面光线的成像元件实际上没有运动,图像就不会失真。 这就是成像稳定技术, 现在已经相当普遍。 过去它只用在高端摄像机上,现在由于MEMS技术,大量数码摄像机也已采用。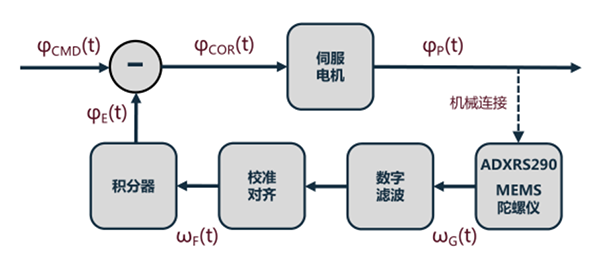 了解这些之后,对于此类系统,我们就能知道这些误差源对系统性能会有什么样的影响。
了解这些之后,对于此类系统,我们就能知道这些误差源对系统性能会有什么样的影响。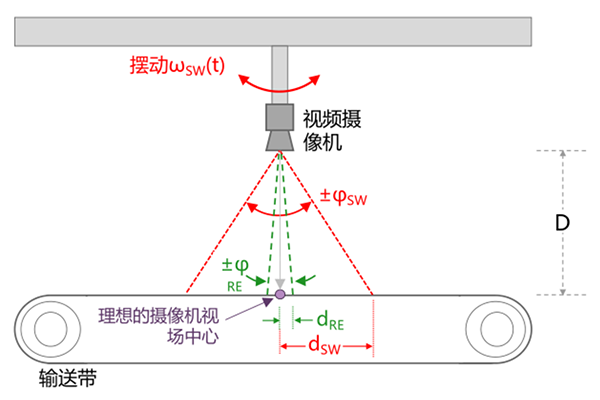 有了这些物理参照之后,为了使它有效,陀螺仪性能必须达到什么程度? 回到之前的公式,不过现在是应用于绿线,它代表执行校正之后或控制环路全面运行之后的残余误差。
有了这些物理参照之后,为了使它有效,陀螺仪性能必须达到什么程度? 回到之前的公式,不过现在是应用于绿线,它代表执行校正之后或控制环路全面运行之后的残余误差。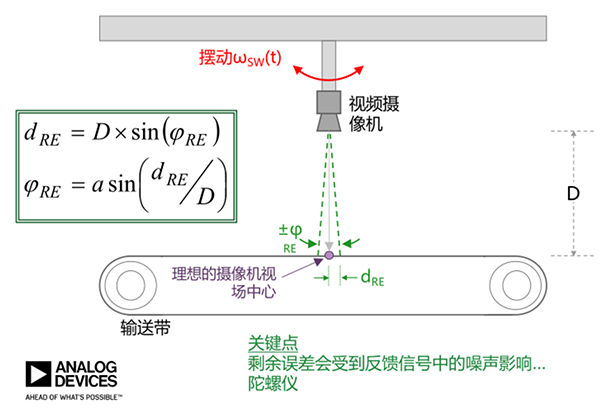 我们都想要成本低至1美元、功耗只有1微安而且终身都保持最高精度的传感器。 但现实是,利用目前的技术无法制造出这样的产品。 现有解决方案的成本从不到1美元到10万美元不等。 对于手头的设计任务,从一开始就要考虑寻找最合适的传感器。 上面提到过,关于运动检测器件,最令人激动的地方是我们能亲眼看到它。 我可以在桌面上推动玻璃杯, 我可以转动我的座椅, 这些都可以同我每天都要打交道的东西联系起来,显然很有帮助。
我们都想要成本低至1美元、功耗只有1微安而且终身都保持最高精度的传感器。 但现实是,利用目前的技术无法制造出这样的产品。 现有解决方案的成本从不到1美元到10万美元不等。 对于手头的设计任务,从一开始就要考虑寻找最合适的传感器。 上面提到过,关于运动检测器件,最令人激动的地方是我们能亲眼看到它。 我可以在桌面上推动玻璃杯, 我可以转动我的座椅, 这些都可以同我每天都要打交道的东西联系起来,显然很有帮助。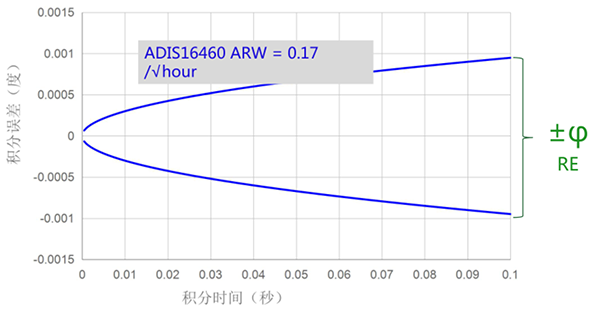 您可以通过多个方面来把我们的应用与此类指标联系起来,这样我们就可以开始估计,在我们的时间范围内,其摆动幅度有多大? 在这个特定情形中,快门开启时间为0.1秒或100毫秒,对应的误差小于0.001度。
您可以通过多个方面来把我们的应用与此类指标联系起来,这样我们就可以开始估计,在我们的时间范围内,其摆动幅度有多大? 在这个特定情形中,快门开启时间为0.1秒或100毫秒,对应的误差小于0.001度。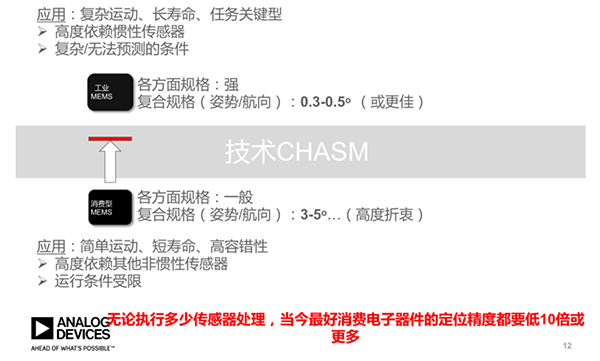 从这里的说明可以看出,消费级设备在变得越来越好,但工业级设备也是如此。 随着时间推移,某些应用空间会成熟起来。 消费级设备可能跟上一些发展,并且帮助解决许多需求,但总是存在一系列不断发展的应用需要更高的性能水平,而且会有项目来证明为此付出额外的成本是值得的。
从这里的说明可以看出,消费级设备在变得越来越好,但工业级设备也是如此。 随着时间推移,某些应用空间会成熟起来。 消费级设备可能跟上一些发展,并且帮助解决许多需求,但总是存在一系列不断发展的应用需要更高的性能水平,而且会有项目来证明为此付出额外的成本是值得的。 核心传感器知识和经验
核心传感器知识和经验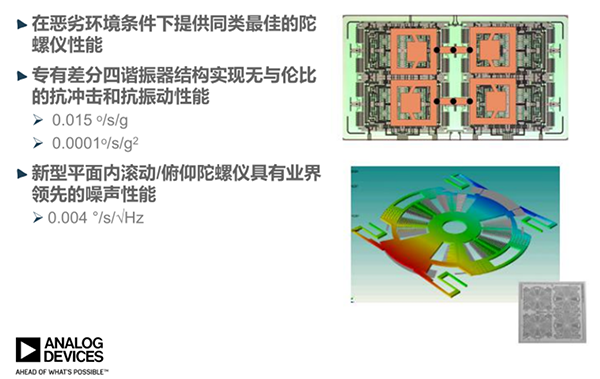 新一代传感器技术,即右下方的弹性碟方法,是当前产品的核心技术,ADXRS290和ADIS16460惯性测量单元均采用该技术。 利用多方面的工艺改进和全新的机械架构,我们得以降低噪声和角向随机游动,这在前面的幻灯片中已予以说明,其性能比我们过去的工业级产品线所采用的各种陀螺仪技术要高出4倍。
新一代传感器技术,即右下方的弹性碟方法,是当前产品的核心技术,ADXRS290和ADIS16460惯性测量单元均采用该技术。 利用多方面的工艺改进和全新的机械架构,我们得以降低噪声和角向随机游动,这在前面的幻灯片中已予以说明,其性能比我们过去的工业级产品线所采用的各种陀螺仪技术要高出4倍。 跨轴灵敏度
跨轴灵敏度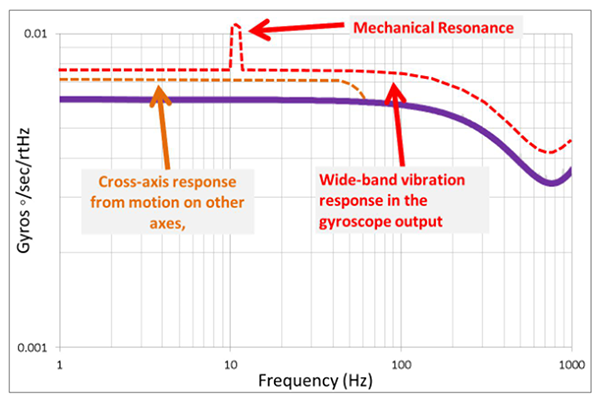 如果只看一个噪声参数,可能会轻信这只陀螺仪更好,但实际上,您需要关注所有三个参数和线性振动信息,甚至可能要估计轴上的旋转量。 全面地看问题,而不要片面地看问题,确实非常重要。 从频谱角度看,总噪声就是曲线下方的面积。 在这一特定情形中,总能量显然是以线性振动响应为主,但不同应用会有不同的分析。 重要的是,在作出关于使用何种产品的长期决策之前,务必注意这一点。
如果只看一个噪声参数,可能会轻信这只陀螺仪更好,但实际上,您需要关注所有三个参数和线性振动信息,甚至可能要估计轴上的旋转量。 全面地看问题,而不要片面地看问题,确实非常重要。 从频谱角度看,总噪声就是曲线下方的面积。 在这一特定情形中,总能量显然是以线性振动响应为主,但不同应用会有不同的分析。 重要的是,在作出关于使用何种产品的长期决策之前,务必注意这一点。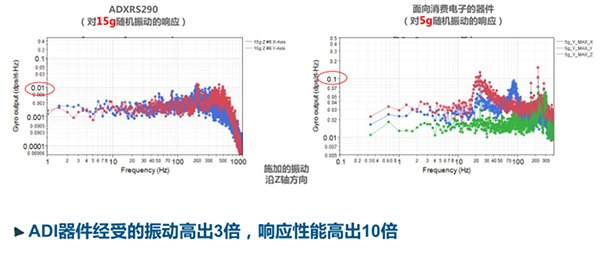 IMU机械设计如何避免设计陷阱
IMU机械设计如何避免设计陷阱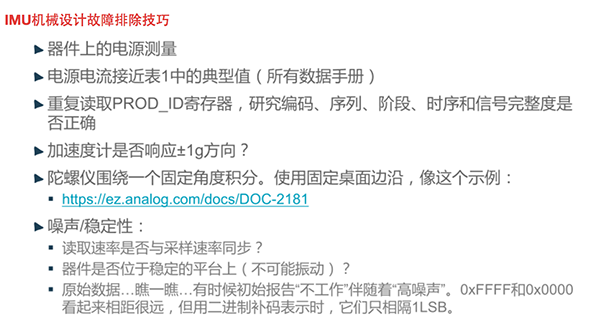
更多回帖

