其中, ei 为各样本的速率误差,n为样本数,τ 为采样间隔。
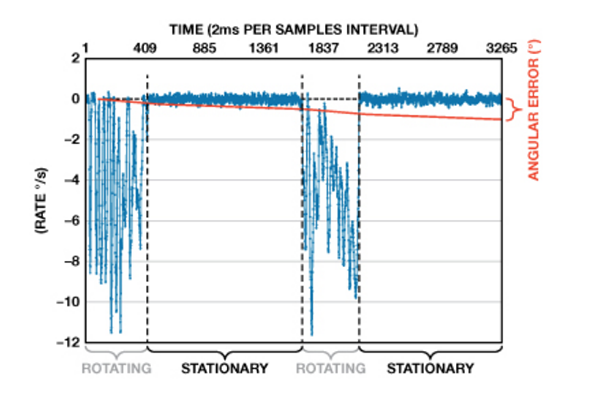
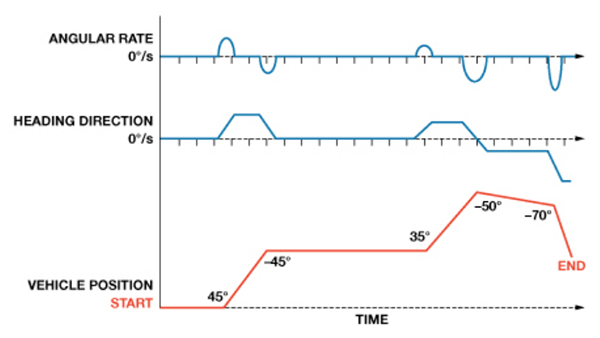
根据该公式,随着所需积分时间变长,累积误差变大,如图2所示。这些速率样本(用带ADXRS810高性能角速率传感器的评估板测得)模拟的是共含有3300个速率样本的DR导航系统。蓝线表示陀螺仪速率样本;红线表示累积角度误差。显然,累积角度误差随时间而变大。
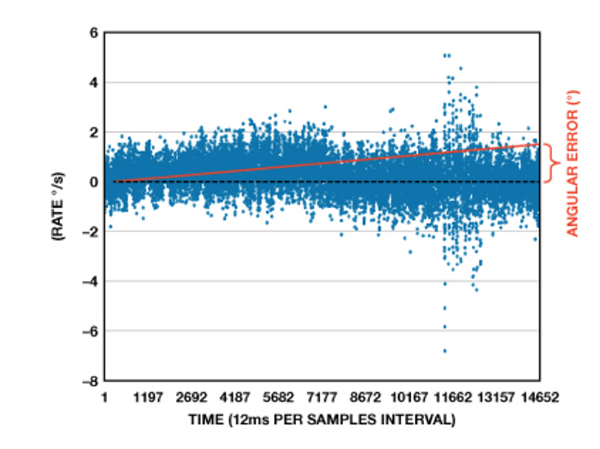
图4. 未经过滤的车载陀螺仪速率样本。(注:角度误差未按比例绘制。)
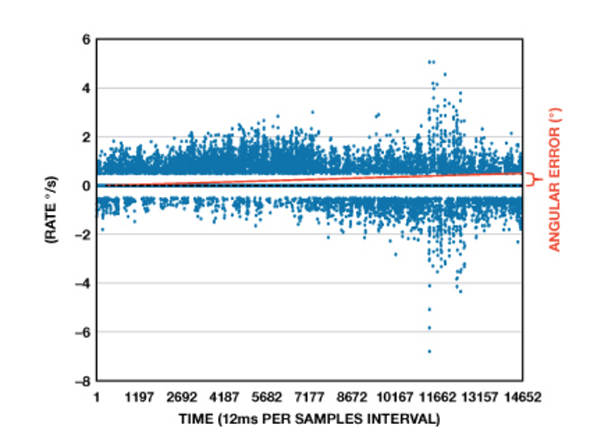
图5. 使用LPF后的车载陀螺仪速率样本。(注:角度误差未按比例绘制。)结论
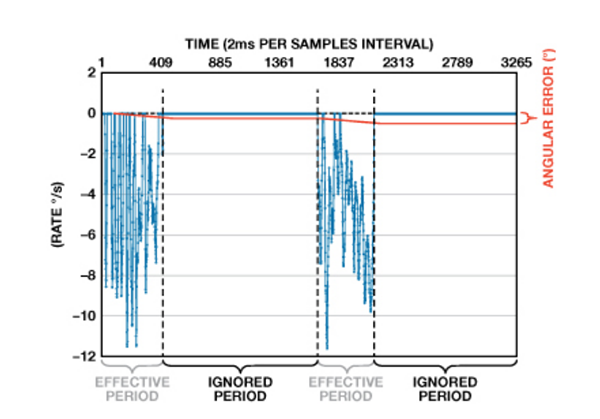
如今的数字陀螺仪具有出色的规格特性,因此,其性能的提升余地有限。在车载DR导航系统以及要求长积分时间的其他应用中,通过设置LPF阈值来缩短积分时间是一种简单但有效的精度提升方法。
ADXRS810高性能、低成本数字陀螺仪采用ADI公司的新型MEMS技术,是车载DR导航应用的上佳选择。该陀螺仪采用超小型封装,具有低失调、低噪声和高速率灵敏度的特点。采用芯片集成温度补偿技术,无需使用外部温度传感器,同时简化了温度补偿算法。其超高的抗冲击和抗振动能力对汽车应用具有十分重要的意义。
Ben Wang
Ben Wang 是ADI公司中国深圳的现场应用工程师(FAE),毕业于湖南大学。他于2009年6月加入ADI公司,此前在National Semiconductor工作过六年。
 其中,ri 为陀螺仪检测到的速率,n 为样本数, τ 为采样间隔。
其中,ri 为陀螺仪检测到的速率,n 为样本数, τ 为采样间隔。 其中, ei 为各样本的速率误差,n为样本数,τ 为采样间隔。
其中, ei 为各样本的速率误差,n为样本数,τ 为采样间隔。