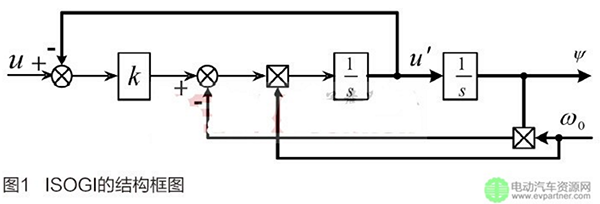
 1 基于ISOGI的定子磁链观测器
1 基于ISOGI的定子磁链观测器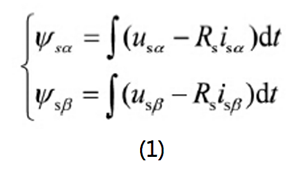 式(1)中:
式(1)中: 为定子磁链的αβ轴分量;μsα,μsβ为定子电压的αβ轴分量;isα,isβ为定子电流的αβ轴分量,Rs为定子电阻。
为定子磁链的αβ轴分量;μsα,μsβ为定子电压的αβ轴分量;isα,isβ为定子电流的αβ轴分量,Rs为定子电阻。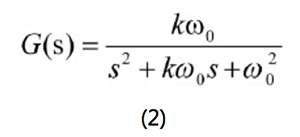 式中:k为增益系数;ω0为定子角速度。
式中:k为增益系数;ω0为定子角速度。 对于输入正弦信号,ISOGI是一个频率自适应积分器,其结构框图如图1所示。
对于输入正弦信号,ISOGI是一个频率自适应积分器,其结构框图如图1所示。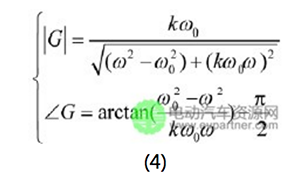 由式(4)可得,稳态ω=ω0时,有|G|=1/ω0,说明ISOGI可以实现在输入频率ω0处的幅值增益为1/ω0;同时,可以看出相角关系∠G=﹣π/2,说明输出信号比输入信号滞后90º。因此,ISOGI环节可以对频率为ω0的输入信号实现纯积分作用。
由式(4)可得,稳态ω=ω0时,有|G|=1/ω0,说明ISOGI可以实现在输入频率ω0处的幅值增益为1/ω0;同时,可以看出相角关系∠G=﹣π/2,说明输出信号比输入信号滞后90º。因此,ISOGI环节可以对频率为ω0的输入信号实现纯积分作用。 和10。,实际中可以根据输入信号中谐波分布不同取合适的k值。
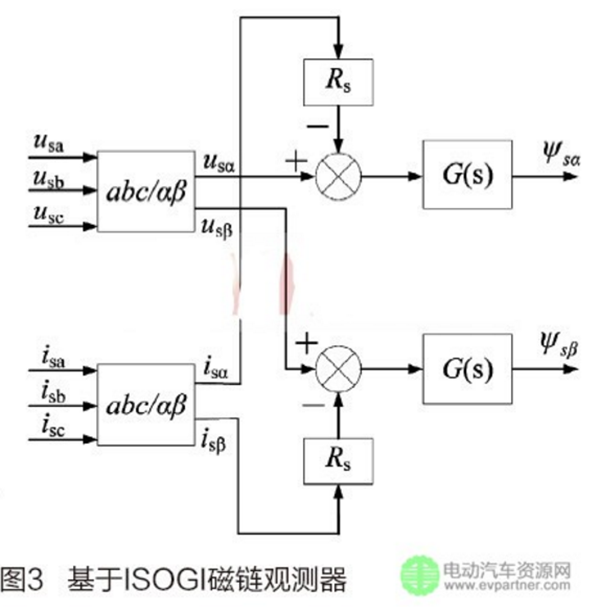
和10。,实际中可以根据输入信号中谐波分布不同取合适的k值。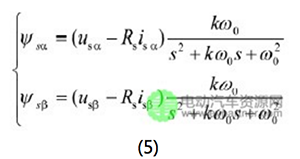 图3中的定子电压可以根据变流器的开关状态计算得到,定子电流通过电流传感器测量得到。在αβ坐标系中经过ISOGI环节可以得到定子磁链的αβ轴分量,根据得到的定子磁链还可以进一步得到电磁转矩值,如式
图3中的定子电压可以根据变流器的开关状态计算得到,定子电流通过电流传感器测量得到。在αβ坐标系中经过ISOGI环节可以得到定子磁链的αβ轴分量,根据得到的定子磁链还可以进一步得到电磁转矩值,如式 (6),其中,p为电机极对数。
(6),其中,p为电机极对数。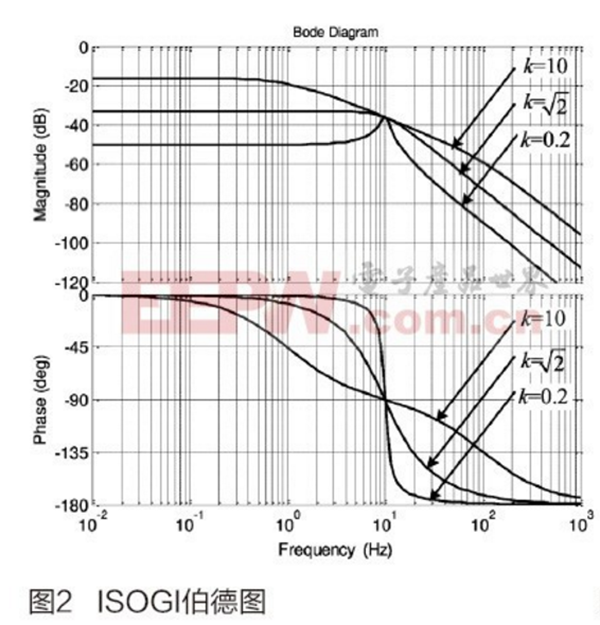
更多回帖

