很多人应该做过各种各样的小设计,有的新颖,让人为之惊叹;有的普通,但是功能齐全;有的简洁,但性能优越。其实,不用羡慕别人,只要你开始动手去做了,前面那些小设计中有的可能就是你的。其实,除了现实生活中的高科技产品外,我认为另一种给人启发的途径就是科幻或者神话之类的电影。因为在这些电影里面可以将一些大胆的想法展现出来,也许某一天,里面的一个应用或想法会在真实世界中以另一种方法或者变体被实现。如,现在的无人驾驶等。
图 自动驾驶汽车(来源于网络)
之前做过一个履带小车,现在趁着东西都在,就想着如何再进一步利用这些东西进行开发呢,于是,最终决定做个远程遥控机器人吧,其实功能也不是很复杂,在原有的履带小车上面,加入一些外设和功能以及对原先不足的地方进行完善,实现更高级的功能。一起来看一下。
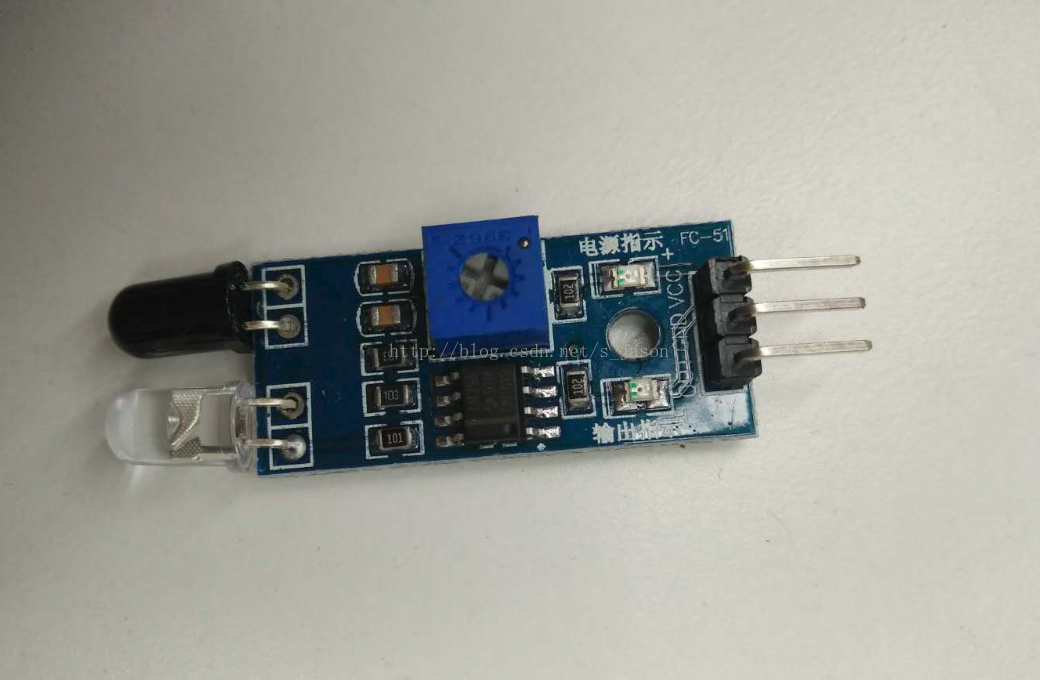
在做小车的时候必不可少的就是蔽障,之前用于蔽障的模块是红外蔽障模块,但是不知道是因为材料问题还是其他原因,不管怎么调试检测距离,最大也才几厘米,和资料上注明的80厘米相差甚远,无奈之下,只能换另外一种解决方案了,之前是有加超声波模块来进行远处物体的识别,以达到提前发现及时减速和躲避的目的,所以,现在将红外蔽障模块全部更换成了超声波模块。
图 红外蔽障模块,超声波模块
其次呢,原来的履带小车只是能进行简单的前进、后退、转弯和蔽障等功能,在此基础上又添加了一个扩展的摄像头,这个摄像头主要是用来进行实时获取图像,并将图像实时传回客户端或者
手机端,以此达到实时监控和远程控制的目的,当然这只是初期的计划,如果可以的话会将物体识别等加入,实现小车全自动运行、蔽障。而且,如果将gps加上后,当然在精度可以的情况下,你应该想到,最终它可以实现什么功能呢,没错,那就是简化的自动驾驶,当然是不能坐人的。到这,基本上就是远程遥控机器人要实现的所有功能了。