组装您自己的基于 Arduino 的 FPV 头部跟踪器来控制随您的头部移动的摄像头,让您在飞行或驾驶 RC 车辆时环顾四周并观察周围环境,以获得更加身临其境的体验。
有没有想过自己真的在遥控车或飞机里的感觉?使用 FPV 头部跟踪器相机,您可以。它随您的头部移动,让您在飞行或驾驶时环顾四周并观察周围环境,以获得真正身临其境的体验。使用一些常见的伺服器、传感器和 Arduino 板,我将引导您了解如何组装和设置头部跟踪摄像头系统,将其与您的 RC 车辆配对,并让一切顺利启动和运行。如果您准备好为您的 RC 爱好添加全新的视角,那么这个项目适合您!
材料
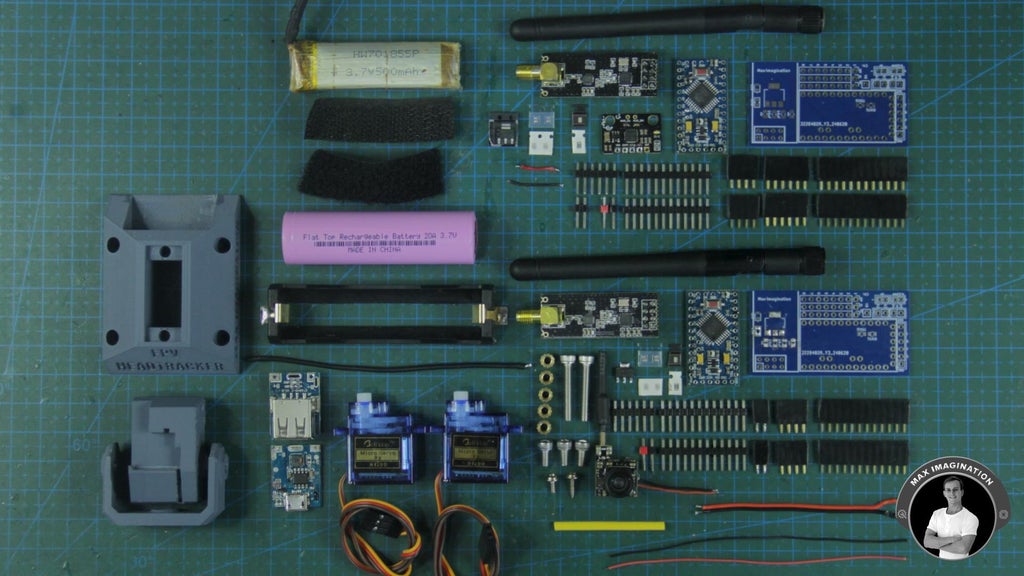
要构建这个有趣的 FPV 头部跟踪单元,以下是您需要的零件、材料和文件。
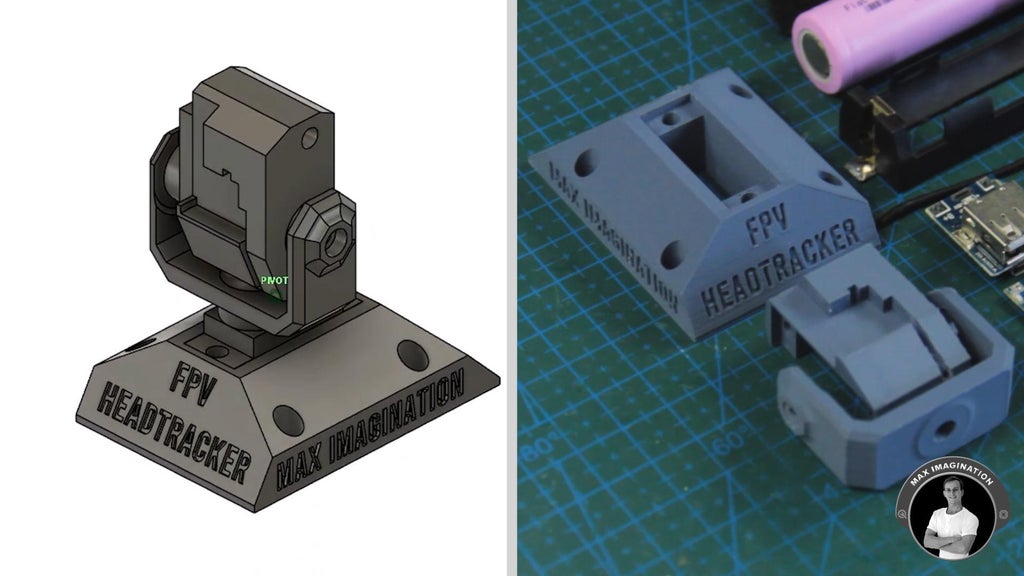
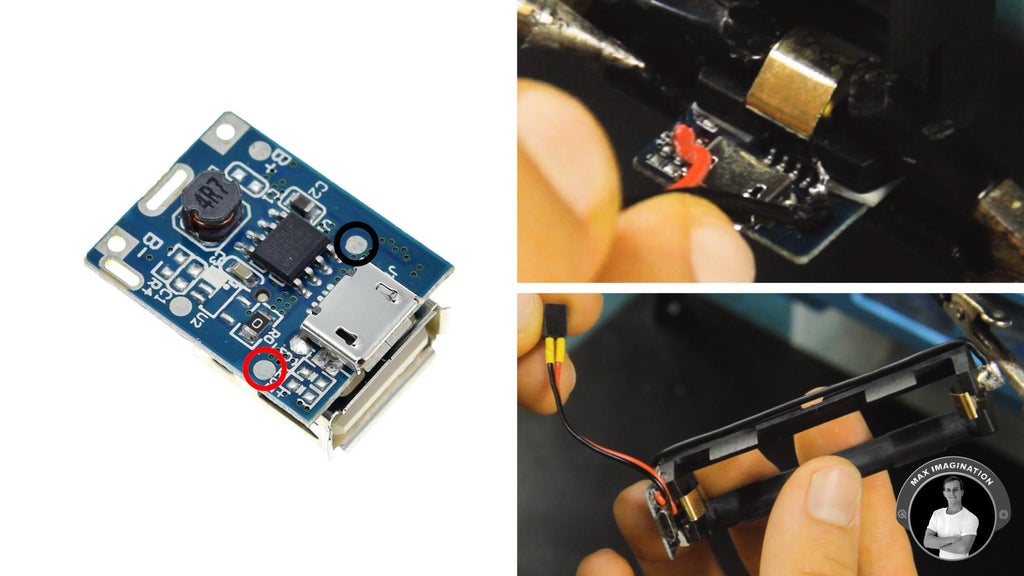
如上所示,我们还有尚未构建的两台设备的所有部件。如上半部分所示,我们有头部跟踪单元的零件,在图像的下半部分,用于容纳微型 FPV 相机的伺服万向节单元的所有部件。
以下是该项目的完整材料清单,包括产品链接和最新的项目成本:
头部跟踪器单元(发射侧)和 FPV 头部跟踪摄像头(接收端):Arduino Pro Mini、NRF24L01、MPU6050传感器、升压 5V 升压电源模块、Arduino 接收器 PCB(来自 Drift Car,用于传输侧) 、 3.3V 稳压器、SMD 红色功率 LED、贴片 15Ω LED 电阻器、SMD 10μF 电容器、SMD 0.1μF 电容器 、排针对、JST 连接器对、 500mAh+ LiPo 电池、魔术贴带对、 USB 电缆的 30AWG 短线、引脚接头对、18650 3000mAh 电池、18650 流通池支架、热缩管 、24AWG 电线等。
项目成本(不包括 FPV 耳机或其他工具):74 美元 - 涵盖整个项目运行所需的服务、3D 设计、打印和组件。30 美元 - 不包括接收器、FPV 摄像头和电池(用于现有的 Arduino 接收器和 FPV 设置)。
项目文件文件夹用于图表、Gerber 文件和代码(免费):
https://drive.google.com/drive/folders/1Ypz9bS0B9EWusCqjtDZVnYJ88AsmpBwK?usp=sharing
第 1 步:接线图和PCB原理图
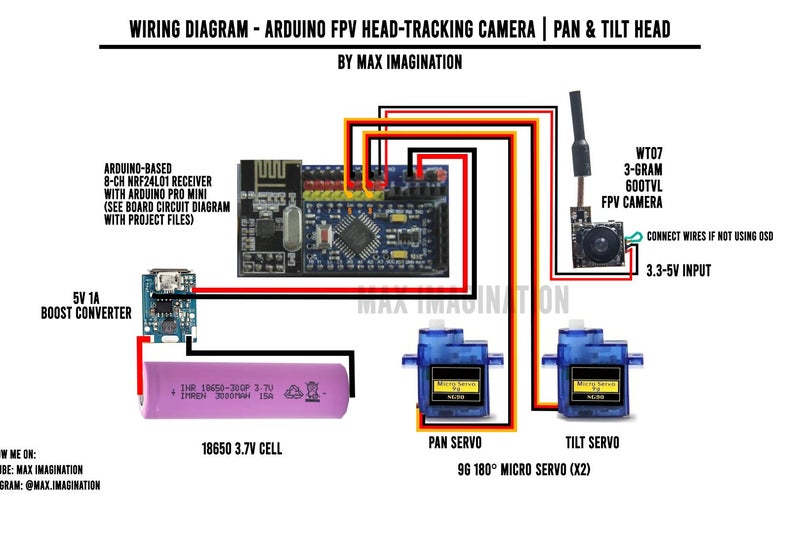
Arduino FPV 头部跟踪摄像头单元的整体电路图至关重要,因为它清楚地概述了每个组件如何连接以确保其正常工作。精确遵循图表有助于防止可能出现的问题,确保平移和倾斜机构与您的头部运动同步平稳运行。
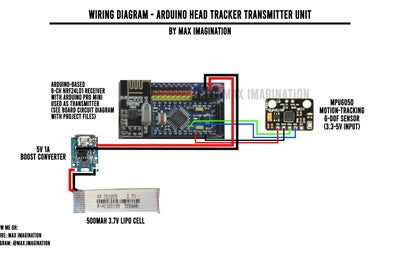
接线图是 Arduino 头部跟踪器发射器单元必须遵循的,因为它绘制了 MPU6050 传感器和 Arduino 接收器之间的连接。准确的布线可确保您拥有可靠的通信和精确的头部运动跟踪,使发射器能够有效地将数据发送到接收器单元。
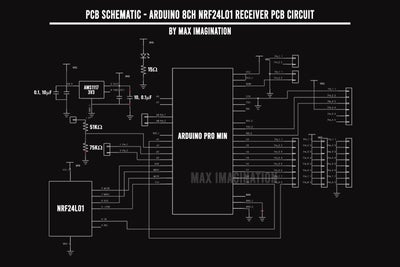
PCB 原理图用于 Arduino 8 通道NRF24L01接收器,是头部跟踪器项目的主要部分,用作发射器和接收器侧的主干控制器。通过使用此电路两次 - 一次用于发送头部运动数据,一次用于接收数据以控制 FPV 相机 - 您可以确保您拥有一致、简化的设计以及两个单元之间的无缝集成。
第 2 步:设计
从 Pan and Tilt 云台开始。我在 Autodesk Fusion 中设计了它,并使其每个组件都以最易于访问的方式连接,因为这个万向节旨在像演示一样独立工作。理想情况下,底座等部件将根据您的 RC 车辆进行形状设计。
要 3D 打印这些部件,您可以从我的 Cults 3D 页面购买和下载 3D 设计 STL 文件,其中包含更多信息,例如 3D 打印设置,以便正确打印出来
3D 文件 (STL) - 平移和倾斜云台单元:
https://cults3d.com/en/3d-model/game/3d-printed-fpv-head-tracker-camera-for-rc-vehicles-2-axis-cradle-3d-design
使用我的 Ender 3 V2 打印机和一些深灰色 PLA 线材,零件就是这样。
第 3 步:PCB设计打板

这些是我们将用于项目两端的 PCB。
最初,该设计用于 8 通道 Arduino NRF24L01接收器,但将用作方位/倾斜云台和云台跟踪器设备的接收器和发射器。
要根据我的设计订购 PCB(需要 x2),订购时,板规格应如下所示:
- 基材: FR-4
- 层数: 2
- 尺寸:55 x 29.5mm
- PCB 数量:5+
- PCB 厚度:1.2
- PCB 颜色:(您的选择)
- 表面光洁度:HASL(带铅)
第 4 步:焊接 SMD 元件
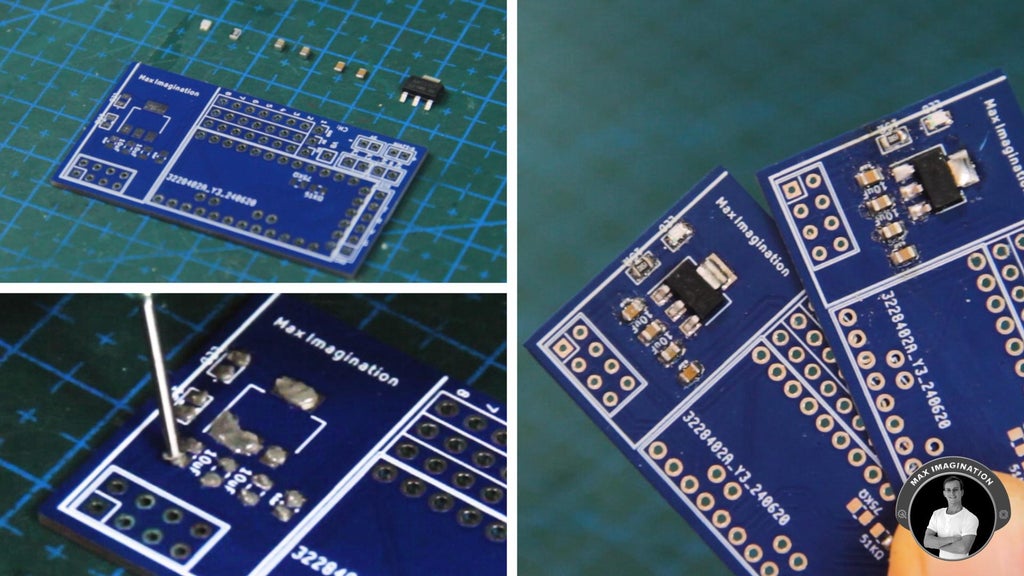
一旦您收到根据我的设计制作的两块板,我们就可以开始用焊膏将表面贴装元件焊接到相机单元的 PCB 上。在每个焊盘上涂上一团糊状物,我们可以放置电源 LED、限流电阻器、用于电源过滤的 10 微法和 0.1 微法拉电容器,以及 3.3V 稳压器。
并不是说推荐这样做,但我用熨斗将这些组件焊接到加热板上。但是,如果您要用焊膏加热它们,请使用加热可调至 200 摄氏度的熨斗,或者简单地使用合适的 SMD 电炉。
我们将对磁头跟踪器(发射器的)PCB 重复此操作,并焊接其表面贴装元件。
第 5 步:焊接引脚接头
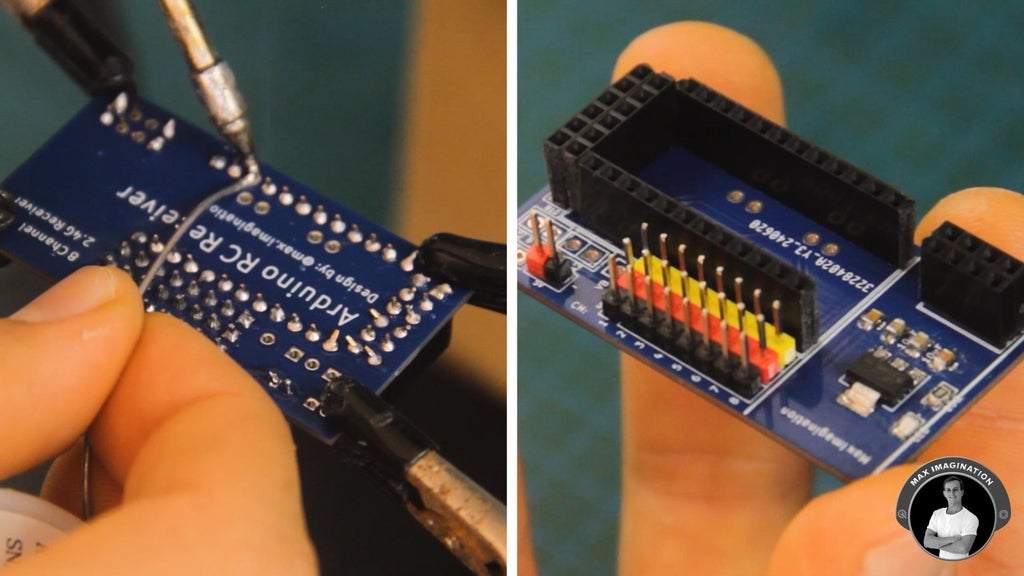
转到通孔元件,让我们插入所有母头引脚,并通过弯曲一些引脚来防止它们脱落。不久之后,我们可以将它们焊接到位。
现在是用于外围信号、电源和接地的公接头。如果您没有彩色的排针,那很好。如果您使用所有单色标题,请不要混淆行。
然后,我们还将插入用于 5V 电源输入或输出的接头。
焊接后,一旦突出的引脚被剪掉,让我们在 Arduino Pro Mini - 微控制器的一些引脚接头上焊接。使用 perf 板可以完美地在焊接时保持接头笔直。
第 6 步:连接模块

只需将 Pro Mini 和 NRF24L01 收发器推入开发板即可。我们以这种方式组装它们,以便它们易于更换或重新用于其他项目。
第 7 步:安装螺纹嵌件

为了组装平移和倾斜云台,我们将 5 个这样的 M3 螺纹嵌件熔化在需要螺栓的部件中,例如相机伺服支架和底座。一旦用烙铁将它们完全推入,使其与表面齐平,我们就可以开始安装 9 克伺服电机了。
第 8 步:安装 Servos
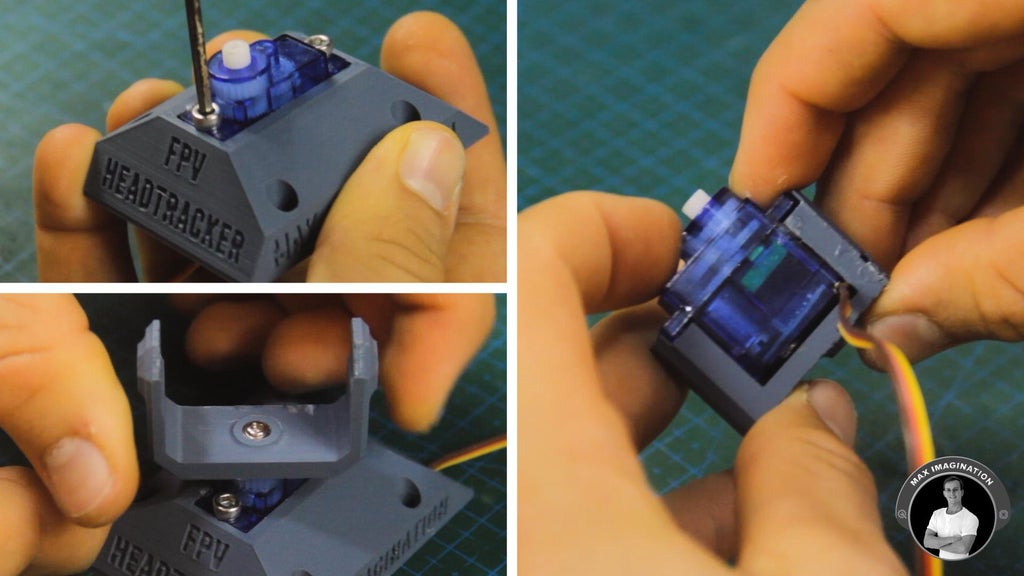
从平移伺服开始,然后固定平移和倾斜支架或接头,然后使用 M3 螺栓套件(20 毫米)中尽可能长的螺栓将倾斜伺服安装在相机伺服支架中。
第 9 步:连接相机和舵机

之后,让我们安装 WT07,5.8Ghz 3 克微型 FPV 相机。最初它有 4 根线,其中两根用于屏幕显示数据,如果您不使用该功能,则需要将其扭在一起并焊接。否则,相机将无法工作,并且不会传输视频数据。相机可以用强力胶或一些双面胶带安装。
要确定的一件事是,这款相机有一些通风,因为它会变热。在相机后部和塑料之间留出一点间隙会很聪明,最好通过边缘超级粘合到支架上。
然后,我们可以将两根小电源线从下孔推向后部。从这里我们可以焊接延长线以将相机连接到其电源。一点热收缩包装管有助于防止短路和电线断裂。
现在,我们可以将这个“相机伺服”部件安装到装置的其余部分,同时确保伺服的轴处于中心位置。
使用另一个双母接头,我们可以为相机的电源线提供一个连接器,该连接器插入 5V 电源轨时要考虑到极性。我们必须确保这对线足够长,以便相机能够达到其全部运动范围,两条伺服线也是如此。
平移舵机连接到数字引脚 3,倾斜舵机连接到 Arduino Pro Mini 上的引脚 5。
第 10 步:将 Boost 转换器连接到电池以获取电源
连接 2.4G 天线后,我们的头部跟踪摄像头单元已完全组装好,现在需要一个 18650 单元的电源。
因此,我们将使用 18650 电池座并使用一点双面胶带来安装这些 5V 升压转换器 USB 模块之一,但将 USB Type-A 接头拆焊以使其更加紧凑。该板只需粘在电池座的正极端子侧,升压转换电路朝内即可。
现在,我们可以直接将正极端子焊接在一起,并通过适当长度的导线将负极端子焊接在一起。
对于 5 伏输出侧,让我们将几根电线焊接到板内侧的小焊盘上,引出一个母针座连接器,以便轻松连接到接收器板。
从这里,我们可以插入 3.7V 电池,正极端子朝向转换器板,并通过其 5V 电源输入引脚为接收器板提供升压的 5V。
第 11 步:组装 Head Tracker 发射器
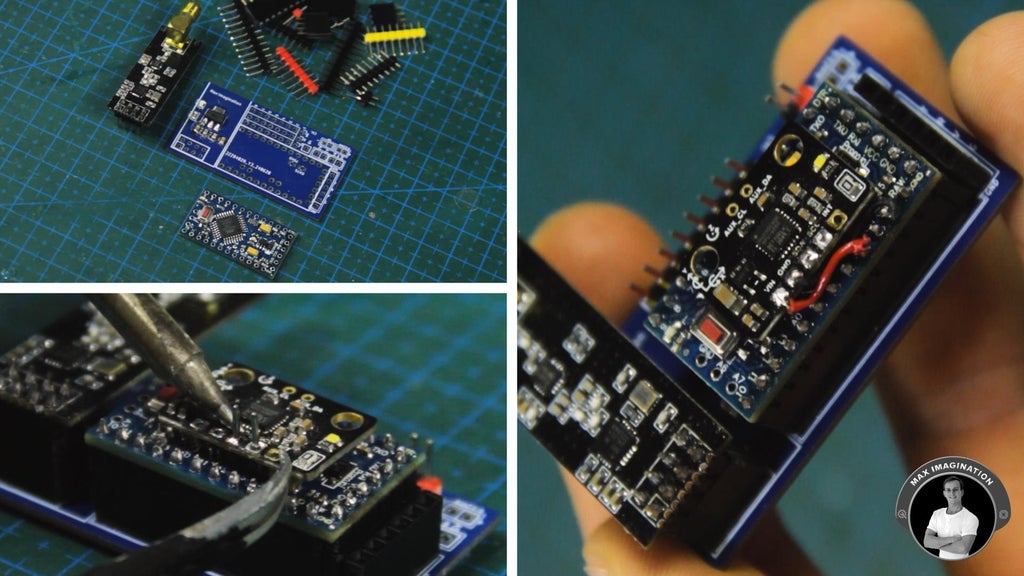
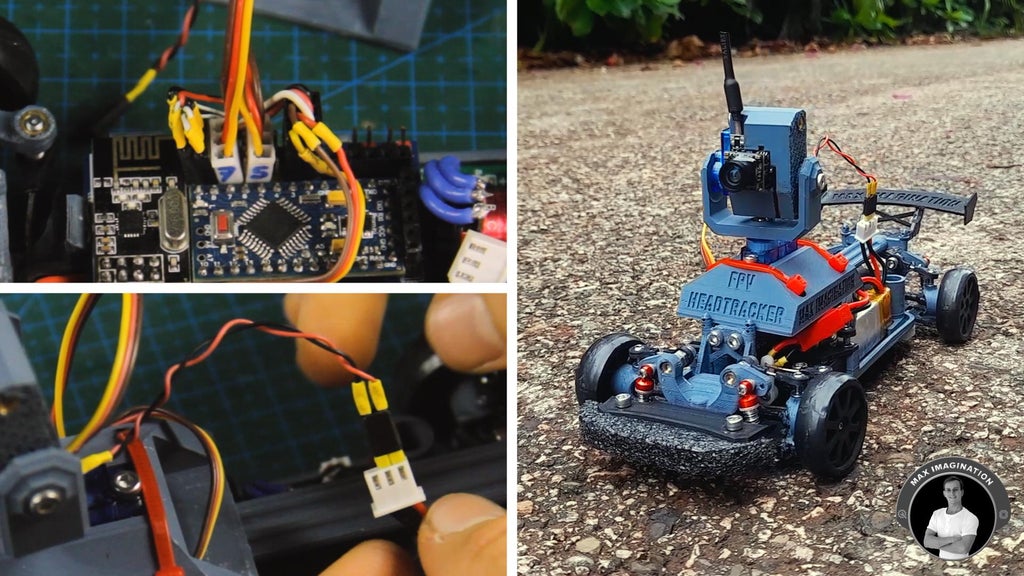
要组装头部跟踪器发射器设备,我们基本上需要将与我们在相机的接收器板上连接的组件相同的组件,除了一个关键元素,即添加MPU6050运动跟踪传感器以跟踪头部的方向。
我们可以通过两个公针接头将这个陀螺仪/加速度计模块直接连接到靠近 Pro Mini 中间的 I2C (I-squared-C) 通孔焊盘(标记为 A4 和 A5)上。
这是相当方便的数据和物理连接来支持它。这里唯一需要的额外接线是来自 Arduino 的 5V 引脚的接地和电源。该模块可以采用 3.3 至 5 伏的电源输入,并将在 5V 下运行。
第 12 步:安装头部跟踪器与电池

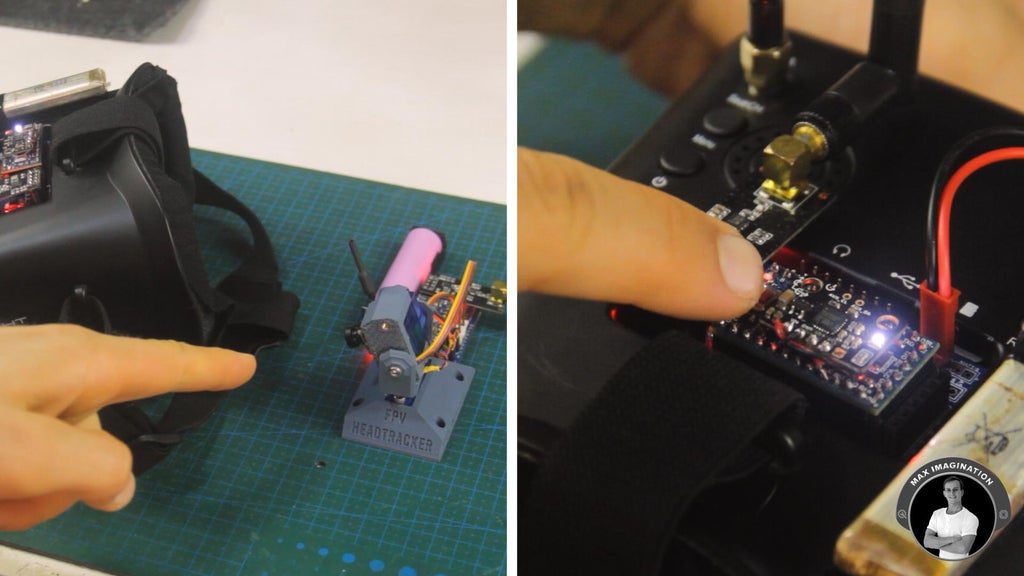
现在,让我们为FPV护目镜打造紧凑的电源系统,采用500mAh LiPo电池以保持轻便。这款升压电池电源通过JST连接器为头部跟踪器供电。
使用魔术贴和强力胶,我们可以轻松地将电池安装在FPV护目镜上,便于充电与拆卸。我所用的模拟FPV耳机来自iFlight,工作于5.8
GHz频段,接收范围可达400米。接下来,将2.4G天线固定好,并把头部跟踪器单元安装在护目镜上,利用护目镜上的空腔或设计并3D打印一个支架,或使用魔术贴进行安装。
第 13 步:编程头部跟踪器(TX)
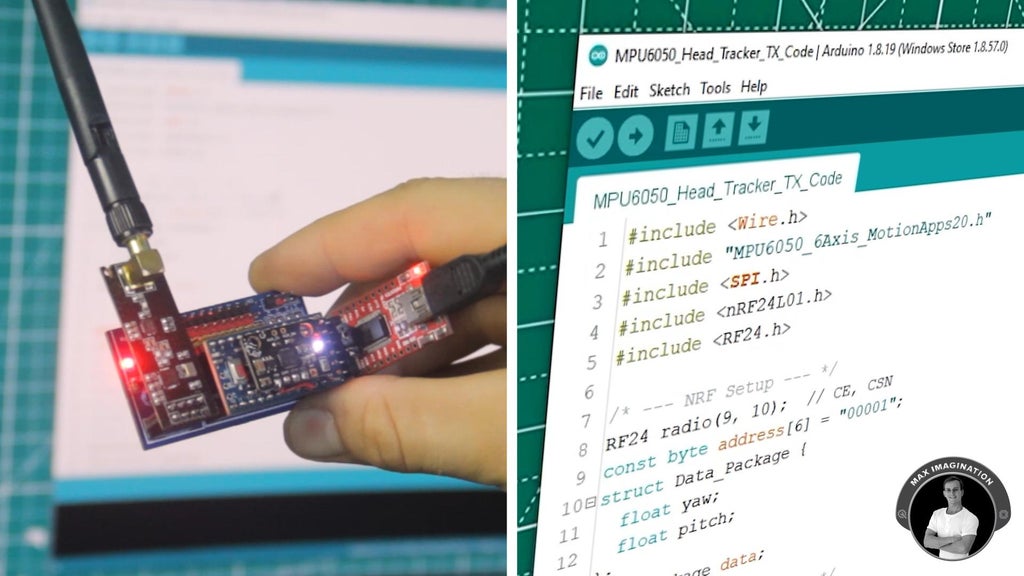
在将云台跟踪器与摄像机单元结合使用之前,需进行编程。这可通过FTDI USB转串口转换器实现,该转换器可轻松插入两块板中的任意一块。
首先,打开头部跟踪器发射单元的代码,确保已安装Arduino IDE中的必要库。检查收发器引脚(CE和CSN - 9和10)是否已定义,并确认没有其他外设占用这些引脚。
最后,在“工具”下选择Arduino Pro或Pro Mini作为开发板,确保选择了正确的处理器和COM端口,然后点击“上传”。
第 14 步:编程头部跟踪相机(RX)

上传发射器代码后,将其从单元中拔出,将FTDI转换器插入摄像机单元的接收器/控制器板,并查看其代码。
确认引脚3和5是否已设置为平移和倾斜伺服引脚,如有需要,可进行更改。在代码中,可根据数据和移动范围调整伺服器的运动限制。
底部的延迟设置可用于平滑伺服系统的移动。在“工具”下,设置应与发射器板相同,然后点击“上传”。
这两个代码文件可在视频描述中的“项目文件”文件夹中下载。至此,FPV头部跟踪相机的发射端和接收端已设置为独立工作,但尚未与RC车辆集成。
使用双面胶带将接收器板粘贴在云台头上,连接电池为设备供电。
第 15 步:校准头部跟踪设置

将头部跟踪器发射器插入FPV耳机并通电。连接后,需几秒钟进行校准,Arduino LED变亮即表示传感器已校准,可以开始移动设备。
现在,FPV头部跟踪相机已启动并运行,可跟踪您的头部运动。
第 16 步:配对 FPV相机
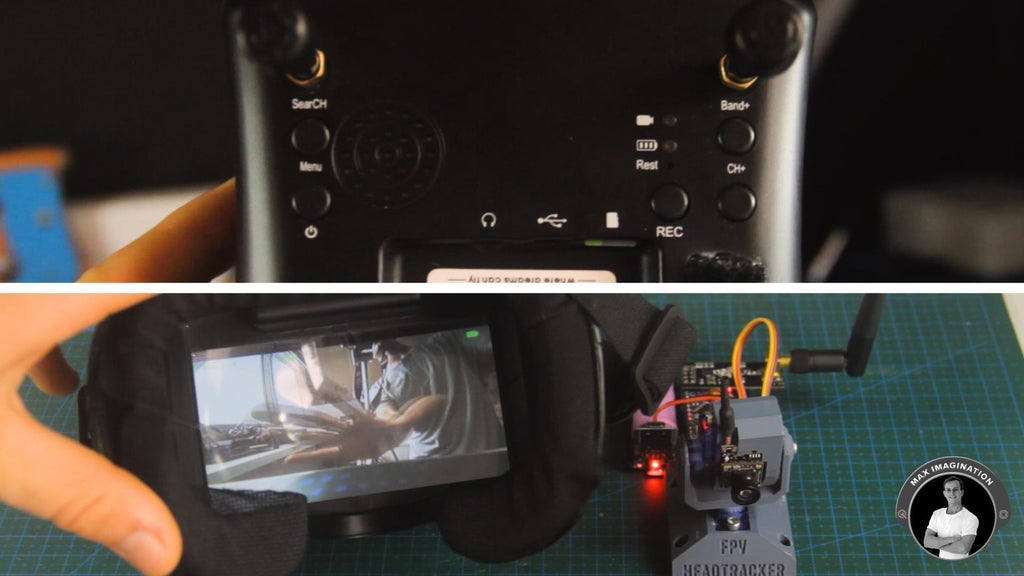
确保相机电源线已连接,打开FPV耳机电源,即可获得视频源。如果无信号,可按顶部的“搜索频道”按钮,自动找到相机的频段和频道。
也可手动调整,按下“Band+”和/或“CH+”按钮,直至频率与相机一致。
第 17 步:重新校准运动范围
如果发现头部跟踪设备未按照期望的相机运动限制进行校准,只需确保耳机指向期望的观察方向,且水平静止,然后按下Arduino的重置按钮,观察相机中心是否移动到新的默认位置。
第 18 步:完整的FPV头部跟踪相机

这款FPV头部跟踪相机及其9克伺服系统具有180度的平移和倾斜自由度。
戴上FPV耳机和头部跟踪设备,通过头部运动控制头部跟踪摄像头单元,享受更加身临其境的第一人称视角体验。
第 19 步:将头部跟踪设置与RC车辆集成

以我的RC漂移车为例,如果我希望手枪式握把发射器和头部跟踪器发射器同时将信号传输到车上的接收器,以控制包括平移和倾斜相机在内的所有操作,该如何实现?
答案是肯定的,这可以轻松完成,无需额外的接收器板!
将漂移车连接到计算机,打开三个代码文件:一个用于头部跟踪器,一个用于RC车发射器,另一个是RC车接收器的合并代码。
这是可行的,因为每个发射器代码都通过其独立的无线电管道地址传输,这些地址由RC车代码处理,并转换为操作汽车和控制跟随头部运动的摄像头的功能。这使得两个发射器仅与一个接收器通信,简化了硬件并降低了成本。
可以在项目文件中找到这三个代码文件,以及独立的FPV头部跟踪相机代码。
第 20 步:将头部跟踪摄像头与RC车连接
关于将摄像头单元安装到RC漂移车上,让我们将其连接起来。平移和倾斜伺服系统分别连接到Digital引脚5和7。其他通道由电机和其他外围设备(如灯和加湿器烟雾效果模块)占用。
重新安装汽车的尾翼和横梁后,使用扎带固定摄像头单元。
需要注意的是,相机消耗的电流(250mA+)比所有三个伺服系统的总和还要多,因此需要从2S电池的一个电池单元直接为其供电。
第 21 步:身临其境体验FPV乐趣

随着手枪式握把发射器和头部跟踪器的启动,我们现在可以控制汽车,同时将头部运动映射到头部跟踪摄像头上,享受更加身临其境的第一人称视角体验。
第 22 步:结论

学会制作自己的FPV头戴式跟踪器后,您已准备好将RC爱好提升到全新水平。从构建响应式伺服云台到通过Arduino和MPU6050传感器将系统与头部运动配对,这个项目将为您提供身临其境的RC车辆操作体验。
遵循我的步骤,将获得与我相同的系统环境,下次外出控制RC车时,将感觉仿佛置身车内。
注意提示:
- 从简单开始 :如果您对焊接或编程相当陌生,请在组装整个系统之前单独测试每个模块(例如,伺服、MPU6050 和 NRF24L01)。尤其是 NRF24L01 当您第一次使用时,它似乎是一个棘手、敏感的板子。
- 电缆管理 :使用热缩管或电缆扎带保持电线井井有条,并防止在运行过程中意外断开。
- 电池安全 : 确保您的电池安全且通风良好,尤其是对于 FPV 相机,因为它在使用过程中会产生热量。
- 校准 :花时间在代码中微调MPU6050的灵敏度和方向,以匹配您的自然头部运动。调整 servo delay 值也可能有所帮助。这将确保更顺畅的操作。
- 文档 :记录连接并遵循接线图,以免偏离本项目的布线路线。
这个项目完成后,可以继续探索改进,例如为远程 FPV 添加更强大的视频发射器或集成其他传感器以扩展功能。祝您制作愉快!
文章作者:Max Imagination
文章来源:https://www.instructables.com/Build-an-Arduino-FPV-Head-Tracking-Camera-for-RC-V/
 /6
/6 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 182
182


 淘帖
淘帖





