[文章]WiFi-IoT 鸿蒙开发套件样例开发

0
2

一、Thread API

osThreadNew()
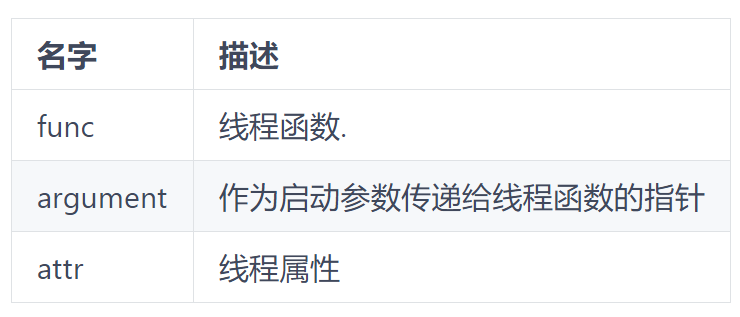
- osThreadId_t osThreadNew(osThreadFunc_t func, void *argument,const osThreadAttr_t *attr )
注意 :不能在中断服务调用该函数
参数
- osStatus_t osThreadTerminate (osThreadId_t thread_id)

二、代码分析
创建线程,创建成功则打印线程名字和线程ID
- osThreadId_t newThread(char *name, osThreadFunc_t func, void *arg) {
- osThreadAttr_t attr = {
- name, 0, NULL, 0, NULL, 1024*2, osPriorityNormal, 0, 0
- };
- osThreadId_t tid = osThreadNew(func, arg, &attr);
- if (tid == NULL) {
- printf("osThreadNew(%s) failed.
- ", name);
- } else {
- printf("osThreadNew(%s) success, thread id: %d.
- ", name, tid);
- }
- return tid;
- }
该函数首先会打印自己的参数,然后对全局变量count进行循环+1操作,之后会打印count的值
- void threadTest(void *arg) {
- static int count = 0;
- printf("%s
- ",(char *)arg);
- osThreadId_t tid = osThreadGetId();
- printf("threadTest osThreadGetId, thread id:%p
- ", tid);
- while (1) {
- count++;
- printf("threadTest, count: %d.
- ", count);
- osDelay(20);
- }
- }
主程序rtosv2_thread_main创建线程并运行,并使用上述API进行相关操作,最后终止所创建的线程。
- void rtosv2_thread_main(void *arg) {
- (void)arg;
- osThreadId_t tid=newThread("test_thread", threadTest, "This is a test thread.");
- const char *t_name = osThreadGetName(tid);
- printf("[Thread Test]osThreadGetName, thread name: %s.
- ", t_name);
- osThreadState_t state = osThreadGetState(tid);
- printf("[Thread Test]osThreadGetState, state :%d.
- ", state);
- osStatus_t status = osThreadSetPriority(tid, osPriorityNormal4);
- printf("[Thread Test]osThreadSetPriority, status: %d.
- ", status);
- osPriority_t pri = osThreadGetPriority (tid);
- printf("[Thread Test]osThreadGetPriority, priority: %d.
- ", pri);
- status = osThreadSuspend(tid);
- printf("[Thread Test]osThreadSuspend, status: %d.
- ", status);
- status = osThreadResume(tid);
- printf("[Thread Test]osThreadResume, status: %d.
- ", status);
- uint32_t stacksize = osThreadGetStackSize(tid);
- printf("[Thread Test]osThreadGetStackSize, stacksize: %d.
- ", stacksize);
- uint32_t stackspace = osThreadGetStackSpace(tid);
- printf("[Thread Test]osThreadGetStackSpace, stackspace: %d.
- ", stackspace);
- uint32_t t_count = osThreadGetCount();
- printf("[Thread Test]osThreadGetCount, count: %d.
- ", t_count);
- osDelay(100);
- status = osThreadTerminate(tid);
- printf("[Thread Test]osThreadTerminate, status: %d.
- ", status);
- }
三、如何编译
将此目录下的 thread.c 和 BUILD.gn 复制到openharmony源码的applicationssamplewifi-iotappiothardware目录下,修改openharmony源码的applicationssamplewifi-iotappBUILD.gn文件,将其中的 features 改为:
- features = [
- "iothardware:thread_demo",
- ]
3.在openharmony源码顶层目录执行:python build.py wifiiot
四、运行结果
- [Thread Test] osThreadNew(test_thread) success.
- [Thread Test] osThreadGetName, thread name: test_thread.
- [Thread Test] osThreadGetState, state :1.
- [Thread Test] This is a test thread. <-testThread log
- [Thread Test] threadTest osThreadGetId, thread id:0xe8544
- [Thread Test] threadTest, count: 1. <-testThread log
- [Thread Test] osThreadSetPriority, status: 0.
- [Thread Test] osThreadGetPriority, priority: 28.
- [Thread Test] osThreadSuspend, status: 0.
- [Thread Test] osThreadResume, status: 0.
- [Thread Test] osThreadGetStackSize, stacksize: 2048.
- [Thread Test] osThreadGetStackSpace, stackspace: 1144.
- [Thread Test] osThreadGetCount, count: 12.
- [Thread Test] threadTest, count: 2. <-testThread log
- [Thread Test] threadTest, count: 3. <-testThread log
- [Thread Test] threadTest, count: 4. <-testThread log
- [Thread Test] threadTest, count: 5. <-testThread log
- [Thread Test] threadTest, count: 6. <-testThread log
- [Thread Test] osThreadTerminate, status: 0.
【套件支持】
- 套件介绍 http://www.hihope.org/pro/pro1.aspx?mtt=8
- 套件购买 https://item.taobao.com/item.htm ... p;scene=taobao_shop
- 技术资料
Gitee码云网站(OpenHarmony Sample Code等) https://gitee.com/hihopeorg
回帖高级模式
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容图片侵权或者其他问题,请联系本站作侵删。 侵权投诉