[文章]华为天才少年稚晖君自制机械臂,能给葡萄缝针的那种,成本 1 万块

0
8
依旧是来自华为天才少年稚晖君,还是他迄今为止搞的项目中,最复杂的那种。
来吧,展示 —— 给葡萄缝针:
在“葡萄包扎术”后,原本裂开小口的它,变成了这个样子:

划个重点:
上面的所有过程,可以在厕所远程、实时完成!
它的名字也非常有趣 —— 叫做 Dummy。
但毕竟头顶着“B站野生钢铁侠”光环的稚晖君,都说这是自己最复杂的项目(耗时 4 个月),硬核程度定然不仅于此。
真实情况是 —— 这台机械臂,里里外外全部出自稚晖君之手!

(友友们,又是被稚晖君破防的一天)
于是乎,很自然的,弹幕再次被网友刷疯,来感受一下这个feel(满屏的“国粹”):
甚至连行内人都发出了惊叹:
真正的机械臂该有的样子
稚晖君想要打造的机械臂,是具备多种交互方式的。
例如把刚才机械臂的末端,换成“力反馈夹爪”,就秒变成了可以夹薯片的机械臂:

除了“力反馈夹爪”,若是换成不同效应器,那可以实现的结果也会不同:
- 安装“激光器”,就可以实现三维雕刻
- 安装“画笔”,就可以进行书画
- 安装小型的“主轴”,可以作为 6 轴的雕刻机
而上面展示的这一切,均是 ——同步现实!除此之外,稚晖君还做了许多不同的交互方式。
例如结合比较前沿的技术,增强现实 (AR)—— 真正的“指哪打哪”了。还有通过示教器来开启的方式。而这个示教器也是出自稚晖君之手,用他的话来说就是:
有我的地方就有屏幕。
这便是稚晖君设计的无线智能小终端,也是这台机械臂的“伴侣”了。
它可以通过低功耗蓝牙和机械臂进行无感连接,而在连接之后,就可以实时显示机械臂的各种状态信息、切换各种功能了。
当然,稚晖君也做了较为“阳间”的图形化方式。
而较为极客的 2 两种方法:通过串口和命令行,也有的哈。

这样的野生钢铁侠机械臂,究竟是怎么“炼成”的?如何打造钢铁侠的机械臂?
这台看起来很酷炫的“手子”,属于小型高精度 6 轴机械臂。整体来说,机械臂的打造主要分为四大部分:机械臂设计、闭环伺服、控制器和空间定位装置,分别对应机器人的躯干、心脏、小脑和眼睛。
机械臂设计,指机械臂的“躯干”,让机械臂能稳定运动的必要步骤,包括机械分析、外观设计(3D 建模)、选材等。当然,这里的设计并不那么容易。光是版本稿,就多达 150 多版:
为了确保稳定 + 便宜美观,最后的机械臂主体采用了铝 CNC(数控)加工(确保稳定),装饰再采用 3D 打印进行制作(节省成本)。
其中,CNC 部分是稚晖君拜托“家里有厂”的 UP 主 @xikii 拆机狂魔你西哥 帮忙制作的,全部的 8 个金属件一共耗时半个月:

最后的外观设计出来,是酱婶的(中国红 & 钢铁侠红),别说还挺好看:
闭环伺服,也就是机械臂的“心脏”,用来提供让机械臂干活的动力。
具体来说,软件上包括 FOC 算法、绝对值编码器 & PID 算法,CAN 总线通信协议等部分,硬件上,除了电机等材料的选用,还包括散热等细节。
通常来说,机械臂会采用无刷伺服电机,但这里它的体积确实比较大。
由于稚晖君想做比较小巧的机械臂,所以最后采用了步进电机,搭配 0 背隙谐波减速器,单个驱动效果做出来是这个样子的:

既然是 6 轴,最后整体采用了6 个步进电机 + 6 个谐波减速器,搭配软件设计构成了机械臂的“心脏”。
控制器,指机械臂的“小脑”,用来操控机械臂的动作、来实现各种功能。
除了原理上需要掌握运动学、动力学分析以外,在软硬件上还需要掌握电路设计、通信和电源管理等额外的“斜杠”技能。
事实上,光是微控制单元(MCU),这台机械臂上就多达 12 个。其中,主控制器(采用冗余设计)和电机伺服驱动器(支持 CAN 总线 & 功率机联)的设计如下:
至于电路设计,也比想象中要更加复杂,毕竟要想达到上述“多控制”功能的话,除了命令行控制以外,蓝牙、无线通信的相关软硬件也需要进行考虑。
没错,除了有线控制以外,蓝牙、WiFi、2.4G 同样能控制这台机械臂~

最后就是空间定位装置了,也就是机械臂的“眼睛”,用来让机械臂“看见”、并操作需要完成的任务。
这里面包括我们常见的双目视觉算法、AHRS 系统和力传感系统等,都在这一步完成。
没错,稚晖君设计的机械臂并非只能做“输入任务并完成”的简单操作,而是一台真正能够从多个角度接收任务、并实时处理的“智能机械手”。
简单来说,就是用双目视觉算法识别,再用 AI 算法实现姿态估计之类的操作:
搭载到机械臂上后,“手子”就能根据人的动作,完成一系列复杂的操作(控制器改自 PS5 手柄):
当然,经过软件去抖、运动范围重映射、力矩强增强等操作后,机械臂能完成比手精度更高的操作(手抖玩家福音)。
最后,就是将这几部分的软件算法和硬件组装起来,进行调试:

最后的成品效果是这样的,非常灵动:
那么,这台机械臂究竟能达到一个什么水平呢?
成本控制在 1 万以内。
众所周知,机械臂的价格会随着精度的提升蹭蹭上涨。一台质量比较好的、精度为 0.6mm 的工业 6 轴机械臂,价格会达到几万元左右,而精度在 0.02mm 左右的四大家族的工业机械臂,价格单位则直接涨到了几万美元。
从稚晖君测试结果来看,精度为 0.01mm 的百分表,进行末端重复精度测量,精度直接达到了 0.02mm 左右:

这样的精度,按理说机器人的价格也不菲。
然而,据稚晖君表示,Dummy 的整体硬件成本,计算下来不到 1 万元!
当然,稚晖君也适当地节省了成本,包括谐波减速器和机械臂本体,就都是二手的(如果是全新的硬件,成本可能需要 2 万元左右)。
除此之外,据稚晖君表示,这台机械臂本身体积也很小,所以运动范围和精度也相应变小和变高了(目前市面上应该是没有体积这么小、精度这么高的机械臂)。
这样的机械臂,究竟可以用在哪里呢?
大胆想象一下,未来如果继续提升精度,远程手术也未尝不可:
还有网友更具体地设想了一下使用场景:即使在偏远的地方,各地大医院的医生也能通过远程手术,同步实现救人;或是利用智能程序设定,实现简单的缝皮等操作,为医生节省更多时间。
对于项目本身,有网友调侃“开源一下脑子”:

也有一些科技区 UP 的梦幻联动(手动狗头):
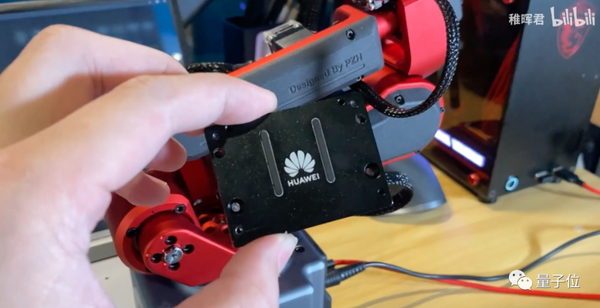
当然,我们也知道,稚晖君已经于去年年底加入了“华为天才少年”。
而这次稚晖君的项目,操作系统和 AI 计算平台也分别都用上了华为鸿蒙和昇腾 Atlas 处理器。
就在 8 月 2 日,任正非还在题为「江山代有才人出」的演讲中表扬了稚晖君的项目,指出这是华为创新的动力:
但对于 2012 实验室,公司从未给过你们过多约束。比如,有人研究自行车的自动驾驶,公司没有约束过他。我们要生产自行车吗?没有啊。这是他掌握的一把“手术刀”,或许以后会发挥什么作用,产生什么巨大的商业价值。
接下来,稚晖君计划将项目进行整理后开源,目前已经在 GitHub 上放了一个坑。对自制机械臂感兴趣的小伙伴,可以不定期去蹲一蹲了~
还有一件事情~
此次制作的项目,其实也是稚晖君给自己的一份生日礼物。
在此祝上真挚的生日祝福~
项目地址(待整理):https://github.com/peng-zhihui/Dummy-Robot
——————
原创:老王丨华为认证讲师 / 腾讯认证讲师 / 鸿蒙开发先行者【公众号:鸿蒙开发者老王】
回帖高级模式
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容图片侵权或者其他问题,请联系本站作侵删。 侵权投诉