[文章]HarmonyOS 驱动平台GPIO---使用指导

0
3
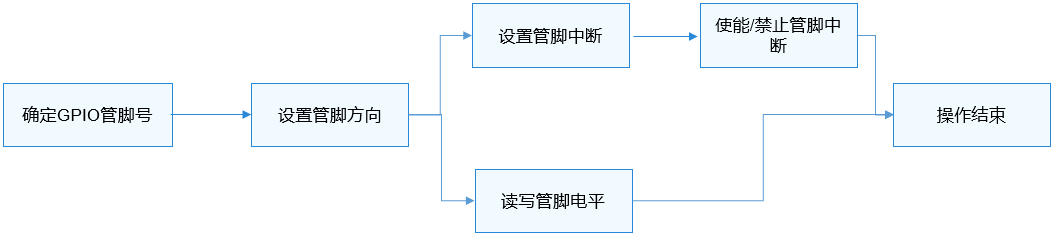
GPIO标准API通过GPIO管脚号来操作指定管脚,使用GPIO的一般流程如图1所示。
图1 GPIO使用流程图
确定GPIO管脚号
不同SOC芯片由于其GPIO控制器型号、参数、以及控制器驱动的不同,GPIO管脚号的换算方式不一样。
- Hi3516DV300控制器管理12组GPIO管脚,每组8个。GPIO号 = GPIO组索引 (0~11) * 每组GPIO管脚数(8) + 组内偏移举例:GPIO10_3的GPIO号 = 10 * 8 + 3 = 83
- Hi3518EV300控制器管理10组GPIO管脚,每组10个。GPIO号 = GPIO组索引 (0~9) * 每组GPIO管脚数(10) + 组内偏移举例:GPIO7_3的GPIO管脚号 = 7 * 10 + 3 = 73
- 设置GPIO管脚方向在进行GPIO管脚读写前,需要先通过如下函数设置GPIO管脚方向:int32_t GpioSetDir(uint16_t gpio, uint16_t dir);表1 GpioSetDir参数和返回值描述参数参数描述gpio待设置的GPIO管脚号dir待设置的方向值,取值参考 GpioDirType返回值返回值描述0设置成功负数设置失败,取值参考 HDF_STATUS
- 读写GPIO管脚如果要读取一个GPIO管脚电平,通过以下函数完成:int32_t GpioRead(uint16_t gpio, uint16_t *val);表2 GpioRead参数和返回值描述参数参数描述gpio待读取的GPIO管脚号val接收读取电平值的指针,取值参考 GpioValue返回值返回值描述0读取成功负数读取失败,取值参考 HDF_STATUS如果要向GPIO管脚写入电平值,通过以下函数完成:int32_t GpioWrite(uint16_t gpio, uint16_t val);表3 GpioWrite参数和返回值描述参数参数描述gpio待写入的GPIO管脚号val待写入的电平值, 取值参考 GpioValue返回值返回值描述0写入成功负数写入失败,取值参考 HDF_STATUS示例代码:
- int32_t ret;
- uint16_t val;
- /* 将3号GPIO管脚配置为输出 */
- ret = GpioSetDir(3, GPIO_DIR_OUT);
- if (ret != 0) {
- HDF_LOGE("GpioSerDir: failed, ret %dn", ret);
- return;
- }
- /* 向3号GPIO管脚写入低电平GPIO_VAL_LOW */
- ret = GpioWrite(3, GPIO_VAL_LOW);
- if (ret != 0) {
- HDF_LOGE("GpioWrite: failed, ret %dn", ret);
- return;
- }
- /* 将6号GPIO管脚配置为输入 */
- ret = GpioSetDir(6, GPIO_DIR_IN);
- if (ret != 0) {
- HDF_LOGE("GpioSetDir: failed, ret %dn", ret);
- return;
- }
- /* 读取6号GPIO管脚的电平值 */
- ret = GpioRead(6, &val);
- 设置GPIO中断如果要为一个GPIO管脚设置中断响程序,使用如下函数:int32_t GpioSetIrq(uint16_t gpio, uint16_t mode, GpioIrqFunc func, void *arg);表4 GpioSetIrq参数和返回值描述
注意参数参数描述gpioGPIO管脚号mode中断触发模式,取值参考 OSAL_IRQ_TRIGGER_MODEfunc中断服务程序,类型参考 GpioIrqFuncarg传递给中断服务程序的入参返回值返回值描述0设置成功负数设置失败,取值参考 HDF_STATUS
同一时间,只能为某个GPIO管脚设置一个中断服务函数,如果重复调用GpioSetIrq函数,则之前设置的中断服务函数会被取代。当不再需要响应中断服务函数时,使用如下函数取消中断设置:int32_t GpioUnSetIrq(uint16_t gpio);表5 GpioUnSetIrq参数和返回值描述参数参数描述gpioGPIO管脚号返回值返回值描述0取消成功负数取消失败,取值参考 HDF_STATUS在中断服务程序设置完成后,还需要先通过如下函数使能GPIO管脚的中断:int32_t GpioEnableIrq(uint16_t gpio);表6 GpioEnableIrq参数和返回值描述
注意参数参数描述gpioGPIO管脚号返回值返回值描述0使能成功负数使能失败,取值参考 HDF_STATUS
必须通过此函数使能管脚中断,之前设置的中断服务函数才能被正确响应。如果要临时屏蔽此中断,可以通过如下函数禁止GPIO管脚中断:int32_t GpioDisableIrq(uint16_t gpio);表7 GpioDisableIrq参数和返回值描述参数参数描述gpioGPIO管脚号返回值返回值描述0禁止成功负数禁止失败,取值参考 HDF_STATUS示例代码:
- /* 中断服务函数,其类型参考 GpioIrqFunc
- */
- int32_t MyCallBackFunc(uint16_t gpio, void *data)
- {
- HDF_LOGI("%s: gpio:%u interrupt service in! data=%pn", __func__, gpio, data);
- return 0;
- }
- int32_t ret;
- /* 设置中断服务程序为MyCallBackFunc,入参为NULL,中断触发模式 OSAL_IRQ_TRIGGER_MODE 为上升沿触发 */
- ret = GpioSetIrq(3, OSAL_IRQF_TRIGGER_RISING, MyCallBackFunc, NULL);
- if (ret != 0) {
- HDF_LOGE("GpioSetIrq: failed, ret %dn", ret);
- return;
- }
- /* 使能3号GPIO管脚中断 */
- ret = GpioEnableIrq(3);
- if (ret != 0) {
- HDF_LOGE("GpioEnableIrq: failed, ret %dn", ret);
- return;
- }
- /* 禁止3号GPIO管脚中断 */
- ret = GpioDisableIrq(3);
- if (ret != 0) {
- HDF_LOGE("GpioDisableIrq: failed, ret %dn", ret);
- return;
- }
- /* 取消3号GPIO管脚中断服务程序 */
- ret = GpioUnSetIrq(3);
- if (ret != 0) {
- HDF_LOGE("GpioUnSetIrq: failed, ret %dn", ret);
- return;
- }
回帖高级模式
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容图片侵权或者其他问题,请联系本站作侵删。 侵权投诉